
资料下载


工业机器人的负载选择及工具限制
分享资料个
我们在工业机器人选型时,往往会遇到工业机器人负载的选择,怎么选择合适的负载?这个难题往往困扰着我们,今天我就为大家解答一下,如何选择合适的负载和合适的夹具尺寸范围。
工业机器人对工具的限制
允许可搬重量
允许最大静负荷扭矩
允许最大惯量力矩
有这3个限制条件,工具设计时,手腕负荷必须控制在允许范围内。
1.可搬重量
机器人的手腕前端安装负荷必须控制在允许可搬运重量内。
示例
搬运机器人的负荷重量,必须考虑抓手和工件的合计。
2.静负荷扭矩
用图表示上述静负荷扭矩的限制范围,就这是下述扭矩图的。确定工具的重 量和重心后、先用这幅扭矩图、看一看简略确认。在限制线旁边计算确认。请观注负荷越来越轻,范围越来越广的情况。
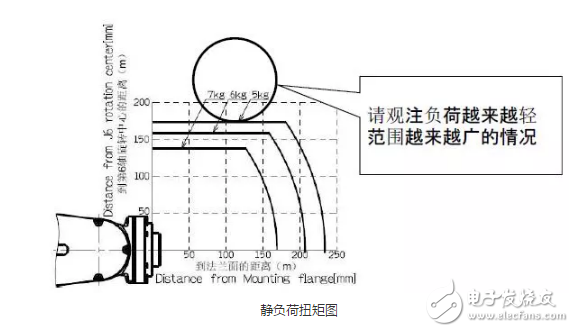
静负荷扭矩图
3.惯性扭矩
机器人手腕前端安装负荷:按重量和重心位置,计算的惯性扭矩必须控制在允许最大惯性扭矩以内。

示例
[计算例]:以MZ07-01为例、5[kg]的负荷离第6轴转动中心0.1[m]的场合、计算惯性力矩。
(惯性矩)=(负荷重量[kg])X(距离到中心[m])²
=5 x 0.1²
=0.05[kg.m²]
扭矩是5kg x 9.8 x 0.1m=4.9[N.m]、参照扭矩图、看到计算的惯性力矩0.05[kg.m²]低于限制值。
用图表示上述惯性力矩的限制范围,就这是下述图的。请注意按静负荷 矩扭、限制值就变化。 确定工具的重量和重心后、先用这幅图、对图线确认。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




