
资料下载


×
基于扩展双权重聚合的实时立体匹配方法
消耗积分:0 |
格式:rar |
大小:1.11 MB |
2017-10-31
分享资料个
立体匹配是对给定的一对立体图像计算视差图的过程。目前许多立体匹配的应用程序需要实时处理,但事实上立体匹配需要经历大规模的计算。幸运的是,无论硬件还是软件方面并行处理技术已经非常先进。因此,在最近几年实时立体匹配的方法被广泛研究。
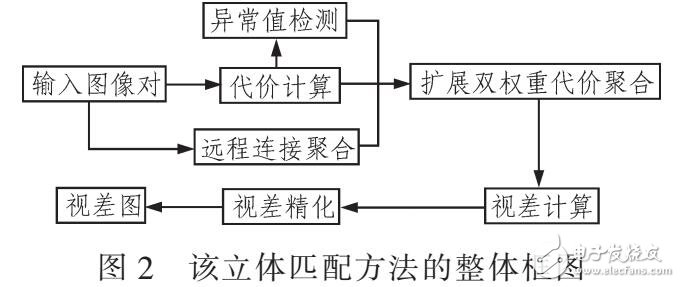
立体匹配可以分为两种类型:全局和局部方法。全局方法通过一个能量函数来表示需要解决的立体匹配问题,然后通过使能量函数最小化来找到最优的解决方案。局部方法计算每个像素的异同,然后确定每个像素的最优视差。局部方法本质上是容易计算和适当并行化的。因此,大多数最近的实时立体匹配的方法都采用的是局部方法。一般情况下,局部立体匹配方法包括以下4个步骤:代价计算,代价聚合,视差计算,视差精化。
文中,提出了一种高精度的实时立体匹配方法。为了实现该方法,采用了容易计算的双权重,聚合步骤中删除现有双权重方法的连通性约束。然而在现有的双权重方法中所有双权重应都需要与中心像素相关联。该方法会导致聚合变得复杂但拥有高精度性。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





