
资料下载


×
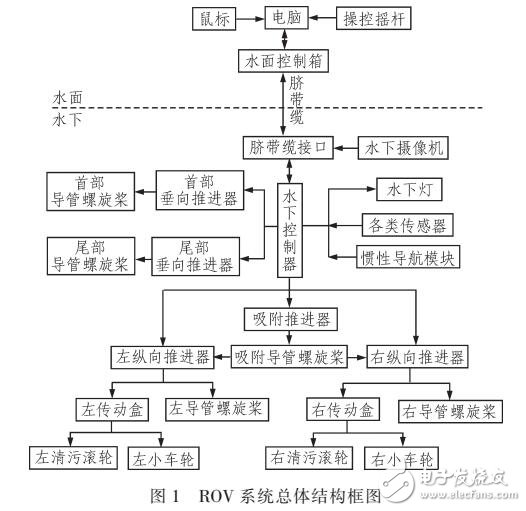
一种面向水下结构检测与清污的ROVA方案
消耗积分:0 |
格式:rar |
大小:2.69 MB |
2017-11-10
分享资料个
水下结构检测与清污机器人是有缆遥控水下机器人(Remotely Operated Vehicle.ROV)的一种,它具有机动灵活、动力充沛、作业深度大、续航力强和环境适应性强等特点,被广泛应用于水下观察、海洋勘探、海洋平台的安装与维修、海洋管线的铺设与检修以及水下考占等作业。ROV通过脐带缆与水面联系,既需要执行传统的水下任务,又可实现近距离结构检测,以及水下结构物、堤坝、船底等清污作业。因此,开展水下结构检测与清污机器人控制系统的研究对于海洋工程的发展具有十分重要的意义。
文中研制一种面向海洋工程水下结构检测与清污的新型有缆遥控水下机器ROV,该ROV是一种多功能、模块化、模态切换ROV。本文将重点介绍ROV的总体设计,模态切换模块机械设计、控制系统设计,整体渊试与实验几方面。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章



