
资料下载


×
基于视觉传感器的智能车摄像头标定技术解析
消耗积分:1 |
格式:rar |
大小:0.5 MB |
2017-12-08
分享资料个
引言
本文以飞思卡尔智能车大赛为背景,使用飞思卡尔(Freeseale)生产的16位微控制器MC9S12XS128作为控制核心,制作一个能巡线快速行驶的摄像头小车。由于摄像头光轴与地面呈一定夹角,于是其成像存在梯形失真;为了扩大视野,广角镜头越来越为很多队伍所采用,于是又存在桶形失真。这两种失真,是每个采用广角镜头的摄像头队伍都要遇到的问题。很多队伍都回避这个问题,直接采用图像预处理后的像素点进行控制。但若将像素点转换为实际物理坐标,无疑更直观,对程序的编写或建模带来很大的方便,并且本文提出的这个方法,可有效解决这两种失真,实际操作并不复杂。
各队解决方案综述
文献[1]提出的方法是:可以通过对于每行提取的道路位置通过一个线性修正来消除梯形失真,可通过实验的方式确定线性补偿的系数。但是该实验方法比较繁杂,并且不能消除桶形失真。
文献[2]制作了一个图像标定板,如图1所示。
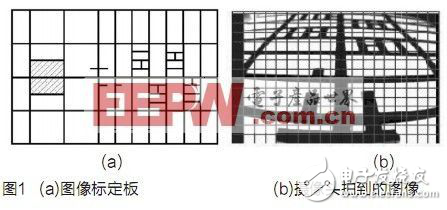
其原理是:图1(a)中阴影部分是车体放置的位置。在标定板上等间距地贴了许多黑线,给标定板拍照后,就可以知道实际中的位置与图像中的位置的相互关系。这个方法由于黑线有一定宽度,所以会存在较大误差。
文献[3]采用非均行采集的方案。所谓非均行采集是与均行采集对应的。在均行采集中,AD模块所采集的行均匀分布于摄像头输出的图像中。而非均行采集则是指,AD模块所采集的行按某种规则非均匀地分布在原始图像中,而这种规则是保证采集得到的图像在纵向上(小车中轴方向)与现实景物不畸变。然后再确定每一行的横向畸变系数。
本文以飞思卡尔智能车大赛为背景,使用飞思卡尔(Freeseale)生产的16位微控制器MC9S12XS128作为控制核心,制作一个能巡线快速行驶的摄像头小车。由于摄像头光轴与地面呈一定夹角,于是其成像存在梯形失真;为了扩大视野,广角镜头越来越为很多队伍所采用,于是又存在桶形失真。这两种失真,是每个采用广角镜头的摄像头队伍都要遇到的问题。很多队伍都回避这个问题,直接采用图像预处理后的像素点进行控制。但若将像素点转换为实际物理坐标,无疑更直观,对程序的编写或建模带来很大的方便,并且本文提出的这个方法,可有效解决这两种失真,实际操作并不复杂。
各队解决方案综述
文献[1]提出的方法是:可以通过对于每行提取的道路位置通过一个线性修正来消除梯形失真,可通过实验的方式确定线性补偿的系数。但是该实验方法比较繁杂,并且不能消除桶形失真。
文献[2]制作了一个图像标定板,如图1所示。
其原理是:图1(a)中阴影部分是车体放置的位置。在标定板上等间距地贴了许多黑线,给标定板拍照后,就可以知道实际中的位置与图像中的位置的相互关系。这个方法由于黑线有一定宽度,所以会存在较大误差。
文献[3]采用非均行采集的方案。所谓非均行采集是与均行采集对应的。在均行采集中,AD模块所采集的行均匀分布于摄像头输出的图像中。而非均行采集则是指,AD模块所采集的行按某种规则非均匀地分布在原始图像中,而这种规则是保证采集得到的图像在纵向上(小车中轴方向)与现实景物不畸变。然后再确定每一行的横向畸变系数。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





