
资料下载


×
一种集成化多舵机控制器设计
消耗积分:3 |
格式:rar |
大小:1.36 MB |
2018-02-01
分享资料个
舵机伺服系统是飞行控制系统的重要组成部分,飞行器依靠舵机伺服系统来控制舵面偏转进而调整姿态,因此舵机性能的优劣直接影响飞行器性能。尽管近几年电动舵机伺服系统已经在体积与质量上有了明显改善,但在航空航天等部分特殊领域中,依然需要多自由度的同时,进一步节省空间,降低系统的复杂程度,这一点在现代制导导弹上更为明显。由于传统导弹的舵面在弹体上均是以X型或十字型布局嘲,即共需要4个舵面。所以电动伺服系统的设计一般依然按照4个独立的控制器进行设计,每个控制器带动一个舵面,控制器相互独立,统一由弹上的飞控计算机进行控制,这种设计方式会使整个电动控制系统较为复杂。
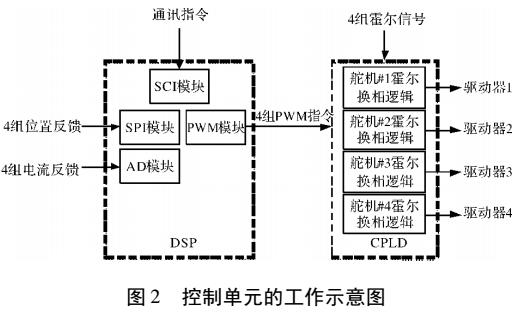
针对传统弹上舵机伺服系统一般相互独立,系统结构复杂,线路繁琐等问题,提出一种集成化的多舵机控制器的解决方案。采用高性能的DSP、CPLD作为控制单元,以智能驱动芯片作为电机的驱动单元,采用电流传感器以及磁性角度传感器作为传感器单元,将原本4套舵机控制器的功能进行整合,实现控制器的简化,降低了系统的复杂程度。相关实验测试对位置角度及控制性能进行了验证,系统控制性能理想。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(1)
发评论
-
 八千米海深
2019-04-16
0 回复 举报在学习舵机控制相关知识,还请大佬指教,我先看看资料 收起回复
八千米海深
2019-04-16
0 回复 举报在学习舵机控制相关知识,还请大佬指教,我先看看资料 收起回复
- 相关下载
- 相关文章







