
资料下载


×
基于单目视觉的轮式移动机器人目标测距
消耗积分:3 |
格式:rar |
大小:0.91 MB |
2018-02-08
分享资料个
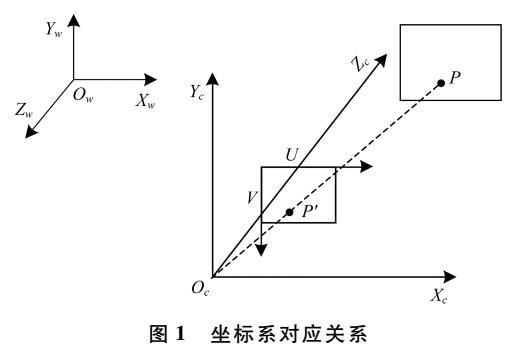
在移动机器人的测距技术中,测距方式主要可分为以下2种:主动式测距与被动式测距。主动式测距通过计算能量波的发射与接收时间的间隔来测量距离,例如超声波测距和激光测距;被动测距则是根据一定的几何物理特性进行处理后得到距离的测量方式。视觉测距是被动测距中一个比较重要的分支,主要分为单目式测距、双目式测距以及结构光测距。双目视觉测距测量精度高,但是算法复杂,运算时间长,特征匹配难,工作环境要求严苛,因此,其研究重点主要集中在特征的匹配以及降低算法复杂度上。结构光测距因受光源的限制,适用场合比较固定。单目视觉测距结构简单,适用场合广,成本低廉,因此得到广泛应用。单目摄像机将三维空间的信息成像到平面上,单目视觉测距就是基于像素平面上物体的信息以及部分已知条件还原目标的三维空间信息。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




