
资料下载


×
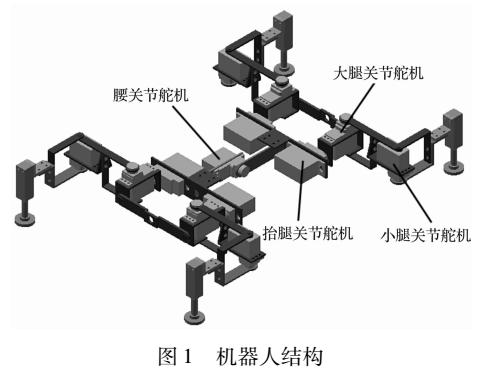
仿壁虎机器人地壁过渡步态规划
消耗积分:1 |
格式:rar |
大小:1.82 MB |
2018-03-12
分享资料个
针对传统仿壁虎机器人空间运动能力不足、空间运动步态方法的可行性问题,基于仿生学原理,设计了一种具有腰关节的每条腿具有三个自由度的四足仿壁虎机器人,对仿壁虎机器人的结构进行了正运动学和逆运动学的分析,建立了各关节角度和机身空间坐标系下各参量之间的关系,在地面与墙壁交角为900的工况下,根据其关于纵向平面对称的结构特点提出了一种对称式地壁过渡步态方法。在Matlab软件上对该步态方法的可控性进行了评价,利用各关节角度与各参量之间的函数关系编程得到了地壁过渡过程中各关节角度、角速度曲线,并在Inventor环境下进行了运动学仿真实验。研究结果表明,各关节角度、角速度均在允许范围内,且角度函数一次连续,验证了结构的合理性和步态的可行性。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




