
资料下载


自动往返智能小车的设计资料合集免费下载论文程序电路图等
分享资料个
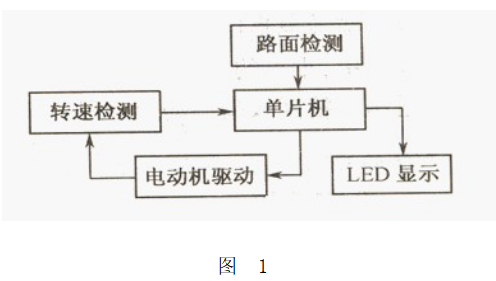
根据题目要求,系统可以划分为几个基本模块,如图 1所示。
对各模块的实现,分别有以下一些不同的设计方案:
1. 电动机驱动调速模块
方案一:采用电阻网络或数字电位器
调整电动机的分压,从而达到调速的目的。
但是电阻网络只能实现有级调速,而数字
电阻的元器件价格比较昂贵。更主要的问题在于一般电动机的电阻很小,但电流很大;分压不仅会降低效率,而且实现很困难。
方案二:采用继电器对电动机的开或关进行控制,通过开关的切换对小车的速度进行调整。这个方案的优点是电路较为简单,缺点是继电器的响应时间慢、机械结构易损坏、寿命较 短、可靠性不高。
方案三:采用由达林顿管组成的H型PWM电路。用单片机控制达林顿管使之工作在占空比可调的开关状态,精确调整电动机转速。这种电路由于工作在管子的饱和截止模式下,效 率非常高;H型电路保证了可以简单地实现转速和方向的控制;电子开关的速度很快,稳定性也极强,是一种广泛采用的PWM调速技术。
基于上述理论分析,拟选择方案三。
2. 路面黑线探测模块
探测路面黑线的大致原理是:光线照射到路面并反射,由于黑线和白纸的反射系数不同,可根据接收到的反射光强弱判断是否到达黑线。
方案一:可见光发光二极管与光敏二极管组成的发射-接收电路。这种方案的缺点在于其他环境光源会对光敏二极管的工作产生很大干扰,一旦外界光亮条件改变,很可能造成误判和漏判;虽然采取超高亮发光管可以降低一定的干扰,但这又将增加额外的功率损耗。
方案二:不调制的反射式红外发射-接收器。由于采用红外管代替普通可见光管,可以降低环境光源干扰;但如果直接用直流电压对管子进行供电,限于管子的平均功率要求,工作电流只能在1OM左右,仍然容易受到干扰。
方案三:脉冲调制的反射式红外发射-接收器。考虑到环境光干扰主要是直流分量,如果采用带有交流分量的调制信号,则可大幅度减少外界干扰;另外,红外发射管的最大工作电流取决于平均电流,如果使用占空比小的调制信号,在平均电流不变的情况下,瞬时电流可以很大(50-100mA),这样也大大提高了信噪比。
基于上述考虑,拟采用方案三。
3. 车轮检速及路程计算模块
方案一:采用霍尔集成片。该器件内部由三片霍尔金属板组成,当磁铁正对金属板时,由于霍尔效应,金属板发生横向导通,因此可以在车轮上安装磁片,而将霍尔集成片安装在固定轴上,通过对脉冲的计数进行车速测量。
方案二:受鼠标的工作原理启发,采用断续式光电开关。由于该开关是沟槽结构,可以将其置于固定轴上,再在车轮上均匀地固定多个遮光条,让其恰好通过沟槽,产生一个个脉冲。通过脉冲的计数,对速度进行测量。
以上两种都是比较可行的转速测量方案。尤其是霍尔元件,在工业土得到广泛采用。但是在本题中,小车的车轮较小,方案一的磁片密集安装十分困难,容易产生相互干扰。相反,方案二适用于精度较高的场合,可以车轮上加较多的遮光条来满足脉冲计数的精度要求,因此拟采用方案二。
4. 电源选择
方案一:所有器件采用单一电源(6节M电池)。这样供电比较简单;但是由于电动机启动瞬间电流很大,而且PWM驱动的电动机电流波动较大,会造成电压不稳、有毛刺等干扰,严重时可能造成单片机系统掉电,缺点十分明显。
方案二:双电源供电。将电动机驱动电源与单片机以及其周边电路电源完全隔离,利用光电藕合器传输信号。这样做虽然不如单电源方便灵活,但可以将电动机驱动所造成的干扰彻底消除,提高了系统稳定性。
我们认为本设计的稳定可靠性更为重要,故拟采用方案二。
5. 小结
经过一番仔细的论证与比较,我们决定了系统各个主要模块的最终方案如下:电动机驱动与调速模块:采用达林顿管的H型PWM电动机驱动电路。车轮检速模块: 采用光电断续开关构成的光电感应系统。路面黑线检测模块:采用调制的反射式发射-接收器。 电源:双电源供电(6节M电池+1节9V方型电池)。


声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





