
资料下载


如何让小车在路上走进行智能小车寻迹的详细资料说明
分享资料个
多数情况下,车是在路上跑的,我们的圆梦小车也不例外,只是它能认识的“路”与现实世界不同,因为它的眼睛与人不同,只能分辨颜色的深浅,所以它的路只能是在浅底色上的深色道路或者反之,我们通常称之为“轨迹”。
为了能辨别出轨迹,必须给小车配上能检测出深、浅颜色的“眼睛”—— 轨迹传感器,首先分析一下圆梦小车的轨迹传感器是如何构成的,又是如何工作的。
一、识别“路”的眼睛 —— 轨迹传感器
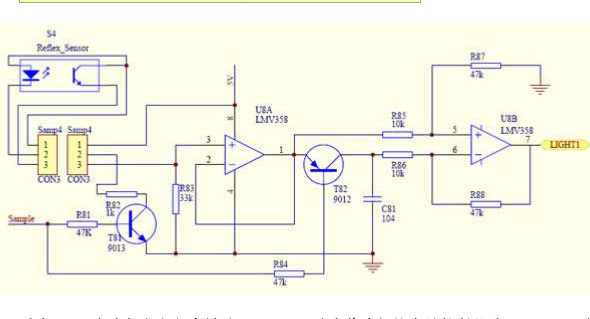
圆梦小车所用的轨迹传感器由反射式光电采样器、信号缓冲、背景光消除电路组成,将处理后红外光反射强弱模拟信号送入单片机,由单片机的 A /D 转换为数字信号后,再由软件来判断是否在轨迹上。
之所以没有直接使用比较器得出逻辑值,一是为了增加灵活性,可以通过软件方便的改变判断阈值,二是可以增加用途,如作为地面灰度检测。同时也增加学习的内容,如 A /D 的使用、逻辑值的转换,还可以用软件构成“施密特触发器”,增加采样的可靠性。
首先分析信号的预处理部分。
因为反射式光电采样最大的干扰就是环境光的变化,小车在行走时会有时顺光、有时逆光,虽可以通过遮光方式来改善之,但是如果能在电路上加以处理,会更加可靠。所以在设计时考虑了这个需求。
也许有人会问:既然已经将模拟量直接送到单片机中了,为何不通过软件处理来消除呢?原因有二:
其一,不知道何时是顺光、何时是逆光?所以无法通过修正判断阈值来消除之;
其二,放大器的信号范围有限,有可能会饱和。
所以使用模拟电路来实现此功能,目前所用的电路如下:

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章






