
如何使用优象光流芯片U30实现四轴无人机悬停
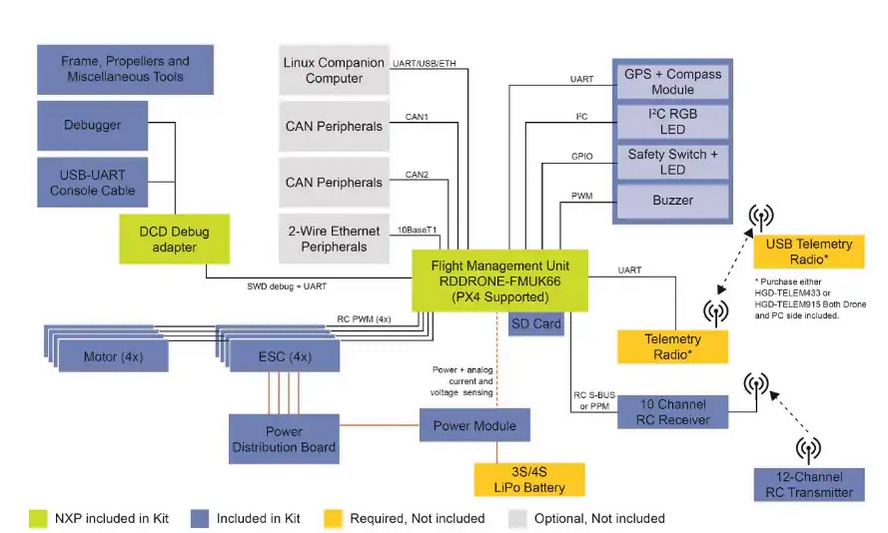
NXP Semiconductors HoverGames无人机系统解决方案

如何轻松更换无人机智能电池的BMS主板?
“鱼鹰”有源相控阵雷达技术规格解析

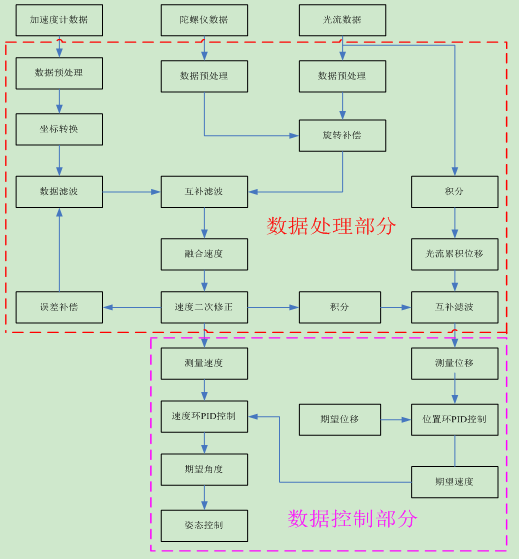
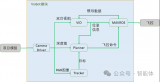
基于px4架构的算法设计

微型丝杆在精密机械设备中的优势

如何准确把握无人机中的PID控制逻辑?

浅析无人机“蜂群”技术的六大核心要素

无人机摄影测量点云分类方法与技巧解析
什么是SLAM?SLAM算法涉及的4要素

24V高压全金属无刷舵机 FS-R009F 扭矩高达150kg

想做无人机编队表演?需要掌握哪些?
无人机飞行中定位误差的影响探究
美军对抗小型无人机系统的战术模式探究
如何选择天线?如何评估一款天线性能?

如何快速上手全球最强开源飞控px4?

eVTOL应用亟需定制动力电池设计,以解决电镀与稳定性挑战
分布式无人机蜂群的工作原理
什么是5G NTN?5G NTN有哪些优势?

PX4自驾仪入门详解

 下载APP
下载APP
 搜索内容
搜索内容
