
资料下载


使用MSP430单片机设计风板控制系统的论文免费下载
挺好d
分享资料个
本系统以 MSP430单片机为控制核心, 通过 PID 算法,实现了对风板的控制。系统主要由电源模块、角度测量模块、电机驱动模块、显示模块、键盘模块和声光模块等构成。 通过 PID反馈输出 PWM来改变直流风机风力大小, 使风板转角根据需求变化。加速度传感器 MPU6050检测风板位置的变化,并将风板角度在 LCD 液晶器上显示, 同时单片机对采集的数据进行分析,实时调整 PWM输出,通过驱动芯片 L298N控制风机风速, 使风板达到稳定的状态, 并带有相应的声光提醒功能, 使系统人性化,经过反复测试,达到了设计要求。
1 系统方案
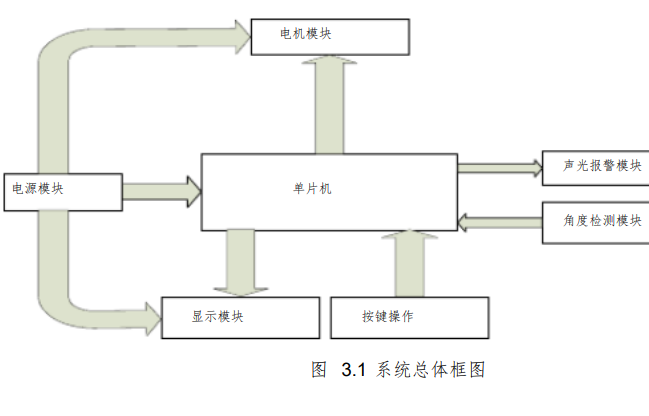
本系统主要由主控模块、角度检测模块、电机驱动模块、显示模块、电源模块组成,下面分别论证这几个模块的选择。
1.1 主控模块的论证与选择
方案一:采用传统 8位的 51 单片机作为该系统的控制核心。 经典 51 单片机具有价格低廉,使用简单等特点,但其存在外设 I/O 端口较少,运算速度低,功能单一,不稳定等缺点。
方案二:采用 TI 公司所生产的 MSP430F149 单片机为主控制芯片, 运算速度快,超低功耗,有非常丰富的片内资源,性价比高。综合比较以上两个方案,选择 TI 公司生产的 430芯片,在低功耗方面有显著的优势,处理数据快,且其片内资源丰富,满足系统设计需求。
1.2 角度检测模块方案论证
方案一:采用模拟三轴加速度计 MMA7260, MMA7260QT是检测物件运动和方向的传感器, 它根据物件运动和方向改变输出信号的电压值。 通过 A/D 转换器读取输出信号,检测其运动和方向。
方案二:采用 mpu6050传感器可准确追踪快速与慢速动作, 并且可调整感测范围,可快速、直接将检测信号给控制器 。控制帆板角度是个快速处理的过程,方案一还需采集电路对 AD进行采集转化为数字量,综合考虑选择方案二。
1.3 电机驱动模块
本设计的主要目的在于控制风机的转速, 因此电机驱动模块是必不可少, 其方案有以下两种。
方案一:采用大功率晶体管组合电路构成驱动电路,这种方法结构简单,成本低、易实现, 但由于在驱动电路中采用了大量的晶体管相互连接, 使得电路复杂、抗干扰能力差、 可靠性下降, 我们知道在实际的生产实践过程中可靠性是一个非常重要的方面。因此此中方案不宜采用。
方案二:采用专用的电机驱动芯片,例如 L298N 、L297N 等电机驱动芯片,由于它内部已经考虑到了电路的抗干扰能力,安全、可靠行,所以我们在应用时只需考虑到芯片的硬件连接、 驱动能力等问题就可以了, 所以此种方案的电路设计简单、抗干扰能力强、可靠性好。设计者不需要对硬件电路设计考虑很多,可将重点放在算法实现和软件设计中,大大的提高了工作效率。
基于上述理论分析和实际情况,电机驱动模块选用方案二。
1.4 显示模块方案
方案一:选用常见的数码管显示,成本低,只能显示简单的字符和数字。显示位数较多时,轮番扫描占用 CPU时间。
方案二:选用 12864显示屏做显示。 12864的显示为 128x64,显示面积大,数字和汉字显示容易实现,程序要求不是很高,更加方便。
方案三:用彩屏做显示。彩屏显示效果好,但成本高,功耗大,编程设计相对繁琐。
由于系统显示信息量较多,对比所述方案,选择 12864作为系统显示器。
1.5 电源模块方案
电源是任何系统能否运行的能量来源, 本系统中电源模块为主控制器、 电机驱动、角度检测模块等提供电源。
方案一:通过电阻分压的形式将整流后的电压分别降为控制芯片和电机运行所需的电压,此种方案原理和硬件电路连接都比较简单,但对能量的损耗大, 在实际应用系统同一般不宜采用。
方案二:通过固定芯片对整流后的电压进行降压、 稳压处理(如 7812 、7805 等),此种方案可靠性、 安全性高,对能源的利用率高, 并且电路简单容易实现。
根据系统的具体要求,采用方案二作为系统的供电模块。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





