

关于轮边电驱动来提升动力性能的方法研究
描述
在汽车上应用轮边电驱动可提升整车空间利用率和动力性能。在MEHREN研究项目框架内对该类驱动方式的潜力进行了全面评估。大陆公司,福特公司,Schaeffer公司和德国亚琛工业大学等合作单位相应公布了其试验研究成果。
1 汽车方案
电动车通常被视为一类关键的交通运输技术,目前采用轮边电驱动可通过将驱动单元移至轮辋中以改善整车空间利用率,并且可预先确定单个车轮扭矩的附加自由度,同时提升了其驾驶灵活性和行驶安全性。由大陆公司,福特公司,谢弗公司和德国亚琛工业大学等单位合作开展的MEHREN(具有最高整车空间利用率和能量利用效率以及高行驶安全性的多电机电动车)研究项目全面地揭示了此类驱动技术的潜力。
为了研究轮边驱动对整车空间利用率的影响,选用福特公司的Fiesta轿车(2013年度车型)为基准车型,紧接着又开发了一款新车型,其在保持乘客舱和货舱位大小以及行驶功率和被动安全性不变的情况下尽可能获得更为紧凑的外形尺寸。
与基准车型相比,新车型的长度总共缩短了250 mm,从而达到了典型A级车的水平,同时显著改善了整车空间利用率。尽管集成了一个具有40.8 kW·h能量储备的动力电池,但是通过应用一种阶梯形多层地板,汽车高度的增加被限制在27 mm。这种轮边驱动单元布置于后桥上,并能提供数值为810 N·m的最大扭矩,此时驱动单元的几何尺寸要求使用177.8 mm×457.2 mm的轮辋。图1示出了基准车型与新开发车型的尺寸比较。
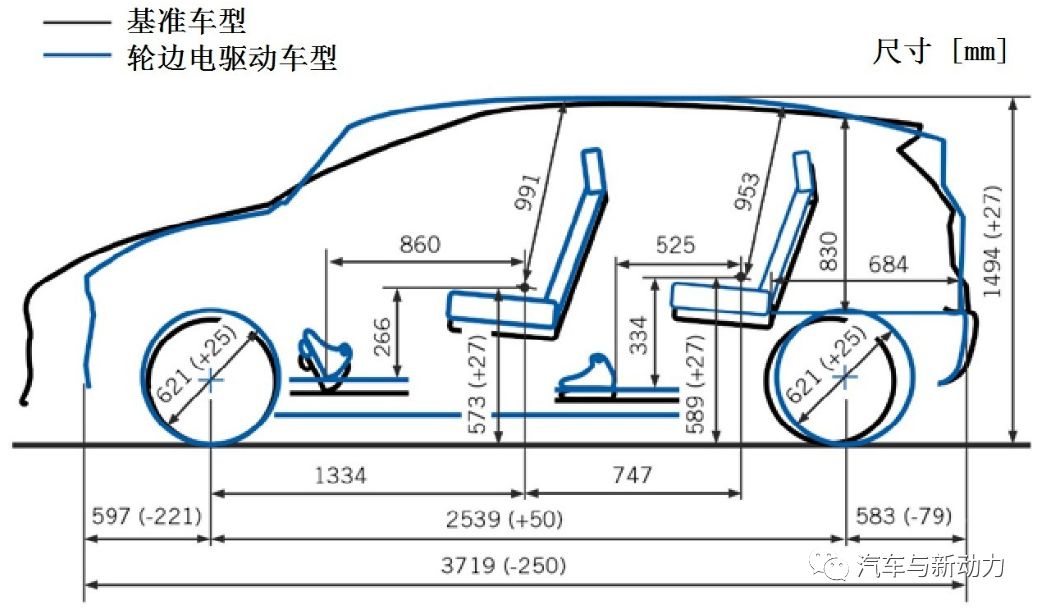
图1 基准车型与轮边电驱动车型的尺寸比较
2 技术载体
该研究项目以福特公司Fiesta轿车为基础开发和建造了两种技术示范车型,其可将轮边电驱动单元集成在现有的汽车结构中(图2)。
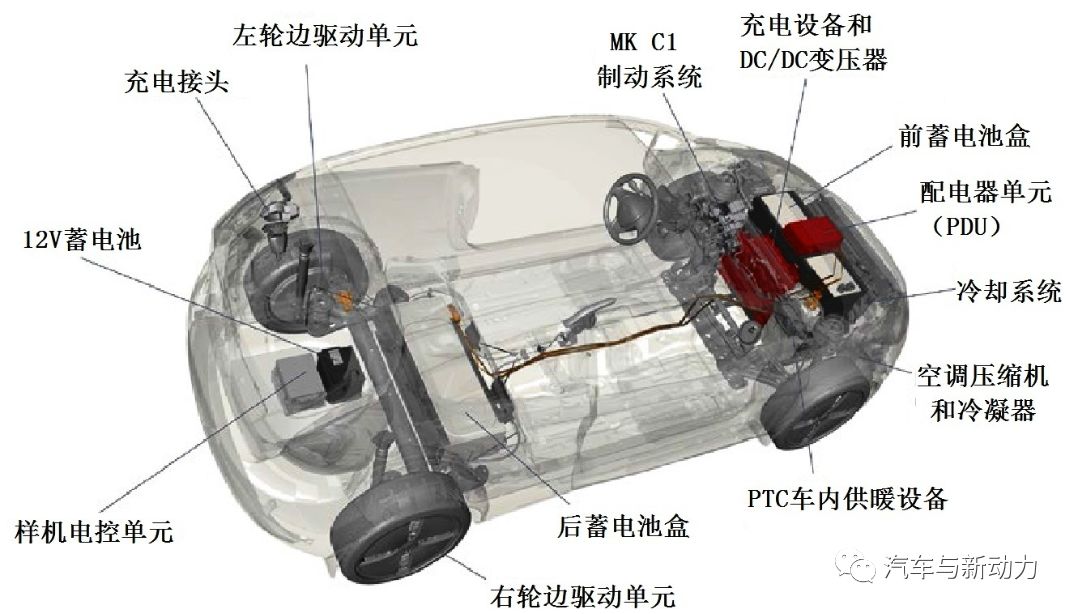
图2 以FordFiesta轿车为基础的技术载体
正如上述方案,两种示范车型选择了两个安装在后桥上的轮边电驱动单元的驱动方案。其与轮边驱动相结合提供了更显著的技术优势:由于负荷位移到制动器位置上,对后桥的制动力要求明显小于前桥,因此在后桥上可使用较小的制动力,而且后轮上车轮导向系统的铰接点位置布置需进行调整,以便给电机提供更大的结构空间,就如整车前桥一样,从而可获得所必需的转向机构运动学。除此之外,在后桥上由轮边驱动所能改善的滑转调节在行驶动力学和行驶安全性等领域取得了显著的改善。
采用了一种利用模拟器进行反馈的线控制动单元作为制动系统(大陆公司MK C1),其可将驾驶员的制动要求通过所有4个车轮上摩擦制动的可变控制附加转换到电机的扭矩上。
3 轮边驱动装置
该研究项目所开发的轮边驱动装置的结构如图3所示。其可用作直接电动驱动(E-WD)装置,除了电机外车轮中还集成了功率电子器件、控制单元和摩擦制动器。
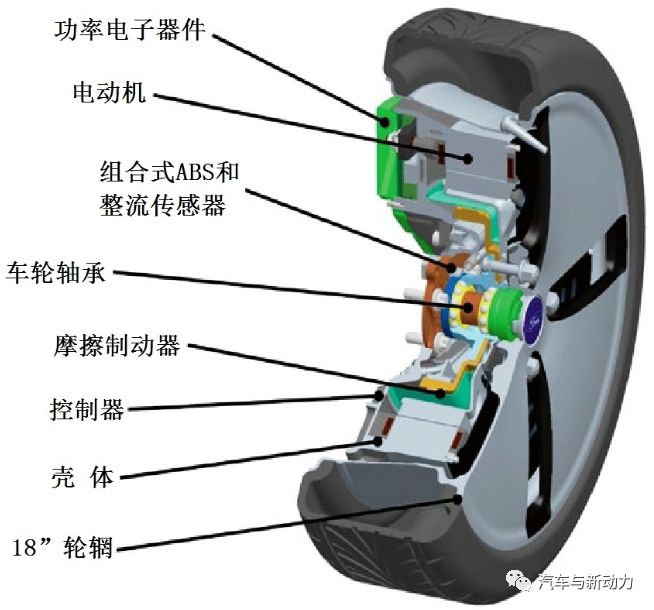
图3 schaeffler公司轮边驱动装置剖视图
采用永磁铁进行励磁的同步电机能获得较高的功率密度和紧凑的外形尺寸。其内转子的结构型式简化了驱动单元的密封效果,并改善了摩擦现象,因为其只需相对较小的直径。
将空气隙保持在较窄的公差范围内对于驱动装置运行的扭矩、功率和效率具有重大意义,同时需防止在转弯时出现的倾斜现象而使定子与转子接触,该问题可通过基于批量生产工艺技术的刚性的车轮轴承结构来解决。
整个驱动装置需进行有效冷却,以便能实现所需的高功率密度。冷却液首先流经电子器件,紧接着流经电机定子。目前集成的鼓式制动器与轮辋一样采用螺栓连接。
4 行驶动力学调节
与量产汽车相比,使用轮边驱动能采用新型的纵横向动力学调节方式,目前已开发了一种全新的行驶动力学调节方式,其可按照驾驶员和辅助系统提出的运动要求以实现稳定、可靠和高效的能量转换。同时与传统的动力学调节方法相比,尤其是在各个执行器之间分配调节参数方面会产生决定性的变化。与调节系统相比的另一个区别是车轮稳定性转速窗口调节的转换,可直接在轮边驱动控制器上得以实现。
通过将调节系统分成多个逻辑上分开的并具有明确定义接口界面的层面,成功地实现了控制元件与执行机构的分离。系统的改变或补充可以此简单而有效地得以实施。
行驶动力学调节的结构由下列3个层面组成(图4):
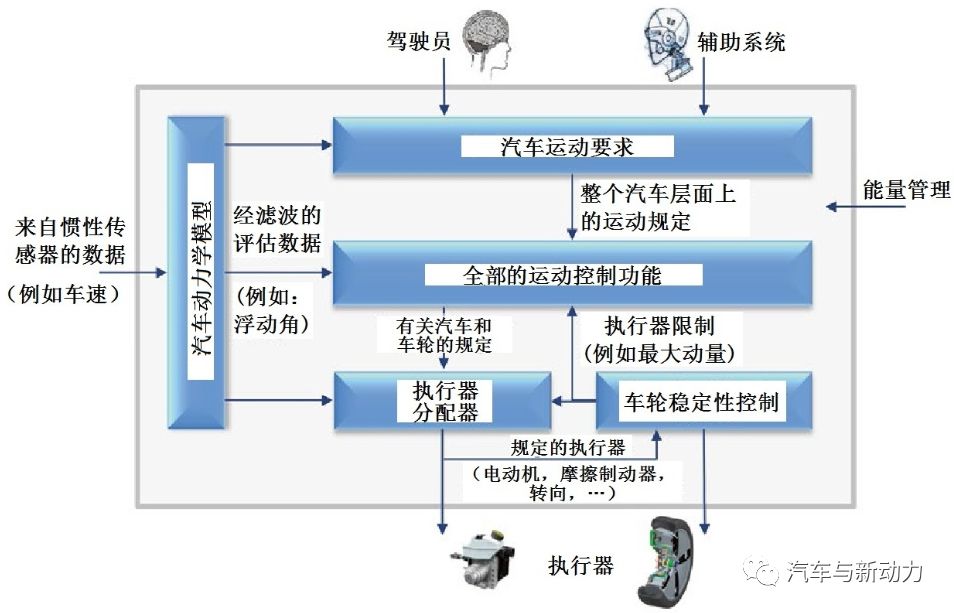
图4 行驶动力学调节
(1)在要求层面(“汽车运动要求”)上接受驾驶员(或辅助系统)的控制规定,所有的要求被换算成额定运动参数,并进行判断,然后传递到下一个层面;
(2)在调节功能层面(“全部的运动控制功能”)上执行功能,它们根据执行器在纵向、侧向(有时也可能垂直)方向上操纵汽车运动;
(3)在控制层面(“执行器/分配器”和“车轮稳定性控制”)上从与汽车有关的调节矢量查明用于各个执行器的调节量,分配到执行器上的是一个永远能在调节范围内解决的优化任务。
同样也属于控制层面的车轮稳定性功能负责实现目标转差率或者调整和优化在驱动及制动时的车轮扭矩或转速。此外,轮边驱动还具有十分重要的优点,电机的扭矩可以无机械滞后的状态直接作用于车轮,因而能非常迅速和精确地进行调节,以此可同样精确地调节车轮转差率。该功能是在“转速窗口调节”软件模型中实现的,而且由轮边驱动单元分别调节各自车轮的扭矩。通过由制动电控单元预先规定的转差率连续地跟踪车轮的打滑极限。
图5示出了用于制动运行的转速窗口调节功能及其与传统的液压制动系统防抱死制动系统(ABS)调节的对比,以此可在一定的转差率下实现最大的制动力。为了使汽车尽快地减速,必须要将制动力调节到最大值。当然,无论是最大制动力的大小还是最大制动力的滑转系数都是可调节的,同时其与路面状况有关。在传统的ABS调节情况下对由摩擦制动的脉动调节来进行最大制动力的相关试验(图5中的棕色曲线)。当轮边驱动采用转速窗口调节方式时,可通过改变规定的滑转系数连续地调节其制动力最大值,并由电机迅速地进行跟踪调节(图5中的橙色运行点),以此可有效改善汽车稳定性。
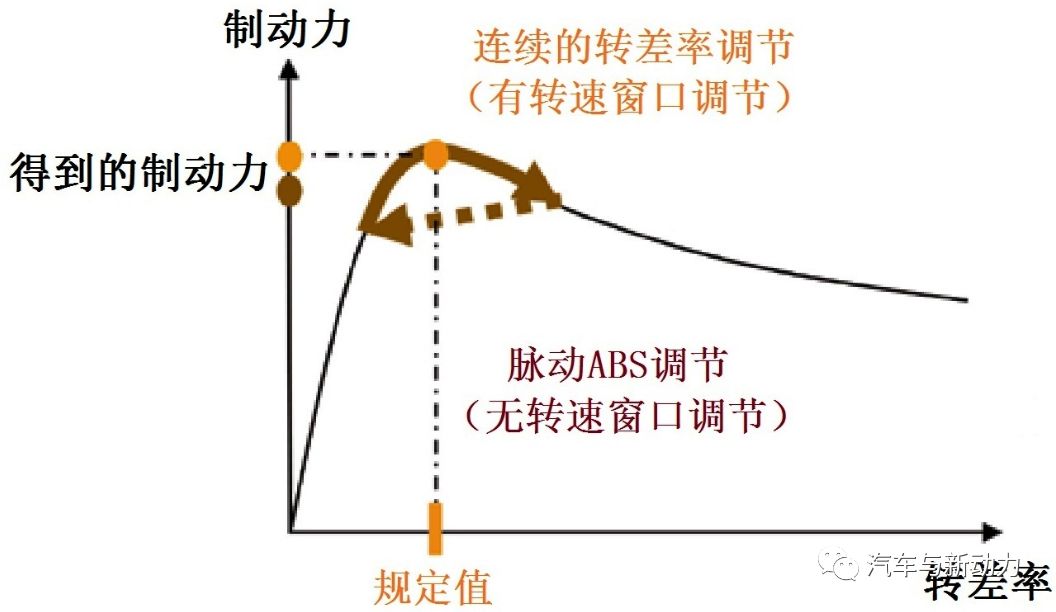
图5 转速窗口调节的工作原理(示意图)
图6示出了行驶动力学调节的软件结构,其由分布在3个电控单元中的许多模块组成,这些电控单元分别由合作单位福特(蓝色),大陆(橙色)和谢弗(绿色)公司开发。
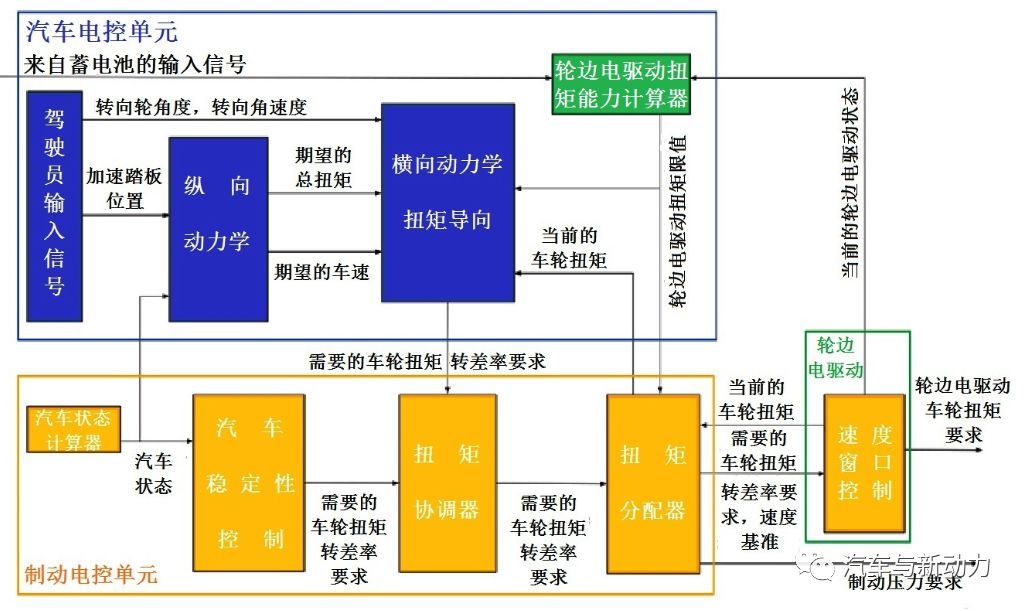
图6 行驶动力学调节的软件结构
“纵向动力学”模块可根据通过加速踏板和转向轮所接受到的行驶指令而组成的纵向动力学以计算4个车轮上所期望达到的扭矩,再将其传递到“横向动力学/扭矩导向”模块。该类扭矩导向功能可通过后轮之间制动扭矩和牵引扭矩的分配以获得最佳的行驶性能。在进行加速时调节扭矩从一个后轮传递到另一个后轮上改善了由驾驶员预先确定的行驶轨迹的随机运动。同时通过转速窗口调节以限定各个车轮的转差率,从而将轮胎作用力保持在一个稳定的范围内,提高了整车灵活性,并使行驶状况更为稳定,既不会调节过量也不会调节不足。
“汽车稳定性控制”模块可平行地检验当前运动状况是否超越汽车平稳性极限,如有必要时则还应计算所需的车轮修正扭矩。最佳的车轮额定转差率的评估也在该模块中进行。“扭矩协调器”模块判断因性能所需的车轮期望扭矩,紧接着产生4个车轮所需的最终扭矩指令。“扭矩分配器”模块在考虑到由“轮边驱动扭矩能力计算器”所评定的驱动扭矩限值和再生策略的情况下,为各个车轮分配扭矩及车轮驱动单元与摩擦制动器之间的额定转差率。“扭矩分配器”使得车轮上的两个执行器在一起使用的情况下尽可能不产生冲击作用,并且使其不会超过额定值。
5 评估
福特和大陆公司在各种高低摩擦系数试验路段上对新开发的行驶动力学调节功能进行评估。下文介绍3种临界行驶机动性的行驶试验结果,为此应用了分别具有4张曲线图的插图予以说明,其通过时间坐标轴示出测量信号,曲线图选择了下列4种绘制方式:
(1)上方的曲线图的绘制始终是来自“轮边电驱动扭矩能力计算器”模块的两个轮边驱动的最大驱动扭矩和制动力矩以及驾驶员要求的总扭矩;
(2)第二张曲线变化图表示的是预设的扭矩以及由转速窗口调节实际提供的扭矩;
(3)第三张曲线图是示意图解,包括各个车轮执行器上的摩擦制动系统压力(其与制动扭矩成正比),为了获得良好的视野,信号均以相同的尺度标出并采用垂直布置的,此外还为该图添加了整车加速度信号。其与下方曲线示意图的绘制相类似,同样以相同的尺度标出并进行垂直布置,同时示出了车轮速度与汽车基准速度的比对。
6 低摩擦系数的ABS制动
图7中示出的是在结冰的路段上采用直线行驶的制动状况。若驾驶员操纵制动踏板,并要求采用最大的制动力矩,则不仅会超出制动泵可提供力矩的上限,并且也超出了从车轮传递到路面的最大力矩,会使车轮出现严重的打滑现象。如果在后轮上由转速窗口调节功能承担转差率调节,而同时在前桥上由ABS调节器承担转差率调节,从中即可看出两种调节器在工作能力方面的明显差异:前轮因摩擦制动执行器缓慢的物理特性而使得其具备转差率较大的阶段特征,与其相比后轮上的转速窗口调节却能进行精确的调节,从而获得了非常精确的基准速度。
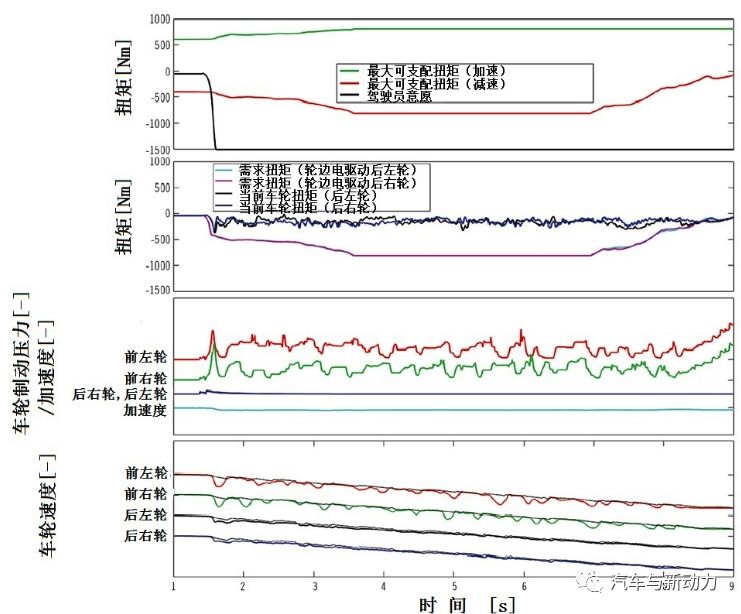
图7 在低摩擦系数路面上的ABS制动
(下面两张曲线图为示意图)
7 摩擦系数从高-低-高转变的路面上的加速
按照下列试验情况即可较好地体现出驱动轮滑转调节(ASR)的效果:驾驶员首先在具有高摩擦系数的路段上加速汽车,然后在具有低摩擦系数的路段上试验加速过程,再在具有更高摩擦系数的路段上继续进行加速行驶试验。在路面摩擦系数从高到低转变的情况下,驱动轮就会发生滑转,那么就应采用ASR来防止该类状况的出现。在摩擦系数转变(从低到高)时就应借助于ASR进一步使汽车加速性能最大化。
在图8上由后轮速度曲线上的一个小凸起即可识别出第一次摩擦系数转变的时间点。转速窗口调节可使扭矩迅速被调整到可支配的水平上,并使车轮保持最佳的转差率。加速度信号曲线表明,加速度如无突然性的变化,会使驾驶员感受到舒适的驾乘体验。
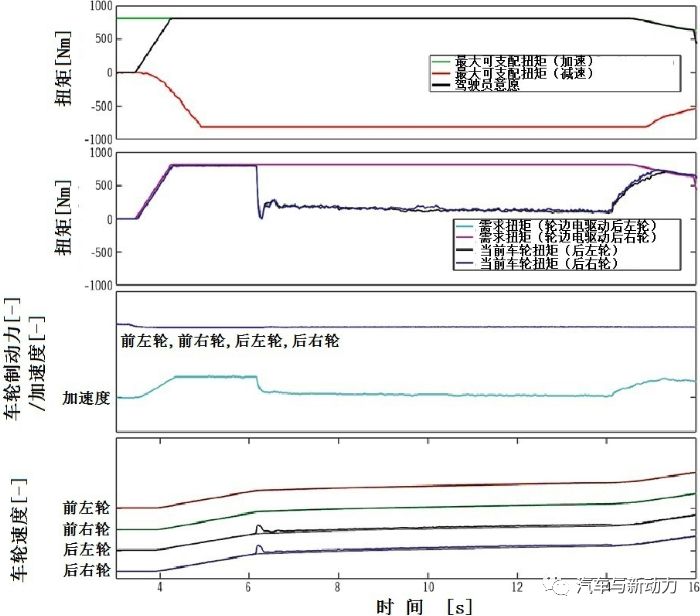
图8 在摩擦系数从高-低-高转变的路面上的加速过程
(下方两张曲线图为示意图)
8 摩擦系数变化时的行驶性能
行驶动力学调节品质的另一个标准是在摩擦系数交错变化的路面上使汽车具备优秀的制动性能。若汽车不进行附加调节就会出现较大的偏转率,同时必须由驾驶员操纵转向方可使汽车的行驶方向保持不变。该类无法进行控制的偏转率对整车驾驶是具有一定风险的,其要求驾驶员具有良好的驾驶技巧。现代ABS系统能应对此类挑战,通过减小偏转率以辅助驾驶员,并使汽车保持稳定性。
图9表明在性能标定前(左)后(右)具有相同的灵活性。在第三行曲线图上采用转向轮角度倾斜以替代汽车纵向加速度曲线。在标定前驾驶员需采用约270°的补偿转向角以保持汽车稳定性,而标定后则仅需要70°的补偿转向角并附加很小的动态转向运动。
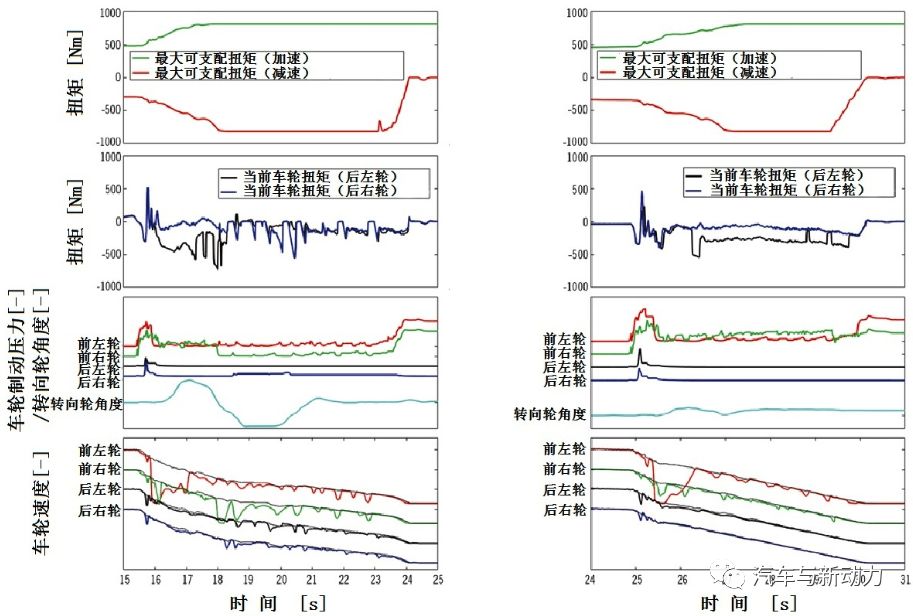
图9 标定前(左)和标定后(右)在摩擦系数交错变化路面上的制动
(下方4张曲线图为示意图)
9 试验研究结论
总体而言,行驶试验表明,采用新开发的动力学调节,在提高动力学性能的同时,能明显改善行驶安全性和操作,此外也证实了在极端条件下实现轮边驱动的工作能力和可靠性,同时也是该类创新驱动方式未来工业化道路上的一个重要环节。
-
轮边电机驱动汽车性能仿真与控制方法的研究2025-06-10 208
-
轮毂电机驱动电动汽车垂向动力学控制研究综述2025-03-07 418
-
轮边电机驱动系统的构成及特点2024-01-05 4332
-
采用具有高重合度的细高齿设计提升电驱动桥NVH性能2022-11-21 3890
-
商用车平行轴电驱动桥下线检验项目及其检测方法2022-11-11 4595
-
一文研究栅极驱动器隔离栅的耐受性能2021-01-22 2018
-
比亚迪K12A电动客车搭载的轮边驱动电机技术特点2019-04-10 13719
-
RoboMaster发布M2006动力系统!体积小、性能强,助力高性能机器人开发2018-05-11 14939
-
如何判断增程式电动车与插电式混合动力汽车2012-10-14 4761
-
弹性轮与地面相互作用建模及仿真研究2009-12-02 1772
-
混合动力汽车电子差速控制系统的研究2009-05-17 3303
全部0条评论

快来发表一下你的评论吧 !
