
资料下载


×
巡检机器人中指针式仪表示数如何自动识别方法概述
消耗积分:0 |
格式:rar |
大小:0.80 MB |
2019-10-29
分享资料个
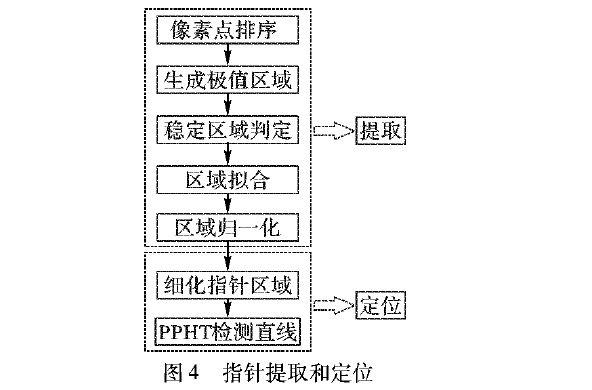
针对巡检机器人室外自主识别仪表示数易受到光照影响的问题,在研究了基于二维伽马函数的仪表图像光照不均匀自适应校正算法的基础上,提出了基于最大稳定极值区域(MSER)提取指针区域的算法。首先,通过三尺度高斯函数提取光照分量,构造二维伽马函数自动地调整图像反光区域或过暗区域的亮度;然后,通过MSER的两次稳定区域检测提取指针区域;接着,以指针通过仪表轴心为条件,用细化算法和累计概率霍夫变换(PPHT)精确地定位到指针,提高了定位直线的准确度;最后,通过PPHT检测的直线两个端点与轴心位置比较,直接可以判断指针指向,更加方便了计算示数。实验结果表明,所提的仪表示数识别方法能够适应不同光照下、不同类型仪表的指针定位,且识别示数的正确率达到94%以上。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





