

Verilog HDL常用的仿真知识你必须知道
电子说
描述
在描述完电路之后,我们需要进行对代码进行验证,主要是进行功能验证。现在验证大多是基于UVM平台写的systemverilog,然而我并不会sv,不过我会使用verilog进行简单的验证,其实也就是所谓的仿真。这里就来记录一下一些验证的基础吧。
一、验证基础与仿真原理
①综合中的语法,都适用于仿真,在仿真中,Verilog语句是串行的,其面向硬件的并行特性则是通过其语义(语言含义)来实现的,因此并不会丢失代码的并行含义和特征。
②仿真的关键元素有:仿真时间、事件驱动、队列、调度等。
③仿真时间:指由仿真器维护的时间值,用来对仿真电路所用的真实时间进行建模。0时刻被称为仿真起始时刻。当仿真时间推进到某一个时间点时,该时间点就被称为当前仿真时间,而以后的任何时刻都被称为未来的仿真时间。
本质上,仿真时间是没有时间单位的,由于代码中有`timescale语句的定义,就出现了xxxns。
仿真事件都是严格按照仿真时间向前推进的,如果在同一个仿真时刻有多个事件要执行,那么首先需要根据他们之间的优先级来判定谁先执行。优先级相同,可能随机执行,也可能按照代码的顺序来执行。
④事件驱动:仿真时间只能被下面事件中的一种来推进:
·定义过的门级或者线传输延时;
·更新时间;
·“#”的事件控制;
·“always”关键字引入的事件控制
·“wait”的等待语句
⑤事件队列与调度:事件队列与调度可以简单地理解为:它决定了verilog在某个时刻先完成哪些语句。
VerilogHDL的分层事件队列为:
当前仿真时间事件
活跃事件(顺序随机或者按照代码出现的顺序)阻塞赋值;
连续赋值;
非阻塞赋值的右式计算;
原语输入计算和输出改变;
系统任务:$display
非活跃事件显示0延时赋值;
Verilog的PLI call back例程
非阻塞赋值更新时间非阻塞赋值产生一个非阻塞更新时间,被调度到当前仿真时间
监控事件$monitor和$strobe系统任务,监控时间不能生成任何其他的事件,这是也要注意的。
将来仿真时间事件将来事件被调度到将来仿真时间的时间。
⑥关于forever、force和release、wait、UDP、PLI等具体语法我就不想记录了,没那个心思。。。
⑦系统任务的使用:
在Verilog HDL 语言中,以“$”字符开始的标识符表示系统任务或系统函数。系统任务和函数即在语言中预定义的任务和函数。和用户自定义任务和函数类似,系统任务可以返回0 个或多个值,且系统任务可以带有延迟。系统任务的功能非常强大,主要分为以下几类:
A、显示任务(display task);
B、文件输入/输出任务(File I/O task);
C、时间标度任务(timescale task);
D、仿真控制任务(simulation control task);
E、时序验证任务(timing check task);
F、仿真时间函数 (simulation time function)
G、实数变换函数(conversion functions for real);
H、概率分布函数(probabilistic distribution function)
由于时间关系,我不进行详述记录了,用到的时候再进行记录。
二、测试文件的激励
(1)信号的初始化问题
主要有三种产生激励的方法:一种是直接编辑测试激励波形(这种基本上被淘汰了),一种是用Verilog测试代码的时序控制功能,产生测试激励。还有就是利用Verilog HDL 语言的读文件功能,从文本文件中读取数据(该数据可以通过C/C++、MATLAB 等软件语言生成)。
①代码中的变量的初始化可以用initial进行初始化,也可以在定义的时候进行初始化。
②在硬件系统中,当系统上电之后,信号电平不是0就是1,不会存在x或者z,这是就会根据EDA的默认状态进行默认的设置。由于上电的默认性,导致这个默认信号不一定是我们想要的信号,因此我们需要进行复位进行初始化。
③在Verilog HDL 中,有两种不同的原因可能导致信号值为x。第一种原因是,有两个不同的信号源用相同的强度驱使同一个节点,并试图驱动成不同的逻辑值,这一般是由设计错误造成的。第二种原因是信号值没有初始化。所以在设计组合逻辑时,需要将不确定的输入转化成确定输入,然后再完成组合逻辑。
(2)时钟信号的生成
①普通时钟信号
所谓的普通时钟信号就指的是占空比为50%的时钟信号,也是最常用的时钟信号,其波形下图所示:
占空比为50%的时钟信号
普通时钟信号可通过initial 语句和always 语句产生,其代码如下:
----基于initial 语句的方法:
parameter clk_period = 10;
reg clk;
initial begin
clk = 0;
forever
# (clk_period/2) clk = ~clk;
end
---基于always 语句的方法:
parameter clk_period = 10;
reg clk;
initial
clk = 0;
always # (clk_period/2) clk = ~clk;
在这里的initial 语句用于初始化clk 信号,否则就会出现对未知信号取反的情况,因而造成clk信号在整个仿真阶段都为未知状态。
②自定义占空比的时钟信号
自定义占空比信号通过always 模块可以快速实现,下面给出一个占空比为40%的时钟信号代码:
parameter High_time = 4,
Low_time = 6; //占空比为High_time/( High_time+ Low_time)
reg clk;
always begin
clk = 1;
#High_time;
clk = 0;
#Low_time;
end
这里由于直接对clk 信号赋值,所以不需要initial 语句初始化clk 信号。当然,这种方法也可以用于产生普通时钟信号,只是代码行数较多而已。
③相位偏移的时钟信号
相位偏移是两个时钟信号之间的相对概念,下图所示,其中clk_a 为参考信号,clk_b为偏移信号:
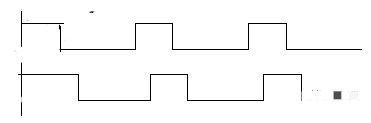
首先通过一个always 模块产生参考时钟clk_a,然后通过延迟赋值得到clk_b 信号,其偏移的相位可通过360*pshift_time%(High_time+Low_time)来计算,其中%为取模运算。
下面代码的相位偏移为72 度:
parameter High_time = 5,
Low_time = 5,
pshift_time = 2;
reg clk_a;
wire clk_b;
always begin
clk_a = 1;
# High_time;
clk_b = 0;
# Low_time;
end
assign # pshift_time clk_b = clk_a;
④固定数目的时钟信号
上述语句产生的时钟信号都是无限个周期的,也可以通过repeat 语句来产生固定个数的时钟脉冲,下面的代码产生了5 个周期的时钟:
parameter clk_cnt = 5,
clk_period = 2;
reg clk;
initial begin
clk = 0;
repeat (clk_cnt)
# clk_period/2 clk = ~clk;
end
(3)复位信号的产生
①异步复位信号
异步复位信号的实现代码如下,代码将产生低有效的复位信号rst_n,其复位时间为100 个仿真单位:
parameter rst_repiod = 100;
reg rst_n;
initial begin
rst_n = 0;
# rst_repiod;
rst_n = 1;
end
②同步复位
同步复位信号的实现代码如下:
parameter rst_repiod = 100;
reg rst_n;
initial begin
rst_n = 1;
@( posedge clk);
rst_n = 0;
# rst_repiod;
@( posedge clk);
rst_n = 1;
end
上述代码首先将复位信号rst_n 初始化为1,然后等待时钟信号clk 的上升沿,将rst_n拉低,进入有效复位状态;然后经过100 个仿真周期,等待下一个上升沿到来后,将复位信号置为1。在仿真代码中,是不存在逻辑延迟的,因此在上升沿对rst_n 的赋值,能在同一个沿送到测试代码逻辑中。
在需要复位时间为时钟周期的整数倍时,可以将rst_repiod 修改为时钟周期的3 倍来实现,也可以通过下面的代码来完成。
parameter rst_num = 5;
initial begin
rst_n = 1;
@(posedge clk);
rst_n = 0;
repeat(rst_num) @(posedge clk);
rst_n = 1;
end
上述代码在clk 的第一个上升沿开始复位,然后经过5 个时钟上升沿后,在第5 个时钟上升沿撤销复位信号,进入有效工作状态。
(4)数据的产生
数据的产生这里就不进行描述了,在以后关于常用的仿真模块中进行记录。
三、提高仿真时间的注意点
①减少层次结构
仿真代码的层次越少,执行时间就越短。这主要是由于参数在模块端口之间传递需要消耗仿真器的执行时间。
②减少门级代码的使用
由于门级建模属于结构级建模,自身参数建模已经比较复杂了,还需要通过模块调用的方式来实现,因此建议仿真代码尽量使用行为级语句,建模层次越抽象,执行时间就越短。引申一点,在行为级代码中,尽量使用面向仿真的语句。例如,延迟两个仿真时间单位,最好通过“#2”来实现,而不是通过深度为2 的移位寄存器来实现。
③仿真精度越高,效率越低
例如包含`timescale 1ns / 1ps 定义的代码执行时间就比包含`timescale 1ns / 1ns 定义的代码执行时间长。
④进程越少,效率越高
代码中的语句块越少仿真越快,例如将相同的逻辑功能分布在两个always 语句块中,其仿真执行时间就比利用一个always 语句来实现的代码短。这是因为仿真器在不同进程之间进行切换也需要时间。
⑤减少仿真器的输出显示
Verilog HDL 语言包含一些系统任务,可以在仿真器的控制台显示窗口输出一些提示信息。虽然其对于软件调试是非常有用的,但会降低仿真器的执行效率。因此,在代码中这一类系统任务不能随意使用。本质上来讲,减少代码执行时间并不一定会提高代码的验证效率。
关于仿真的其他入门知识,比如一些无规律信号的生成、测试结果的存储和显示等问题,我会在后面进行记录,主要是以代码模块的形式记录。
责任编辑:lq6
-
Verilog HDL的基础知识2024-10-24 2326
-
学习FPGA必须知道的社区2024-01-03 1314
-
电阻的秘密——你必须知道的电阻参数2023-12-06 2002
-
Verilog HDL基础语法入门2021-05-06 1123
-
学习开关电源你必须知道的电路详解2020-05-23 9144
-
Verilog HDL的基础知识详细说明2019-07-03 1812
-
如何设计常用模块的Verilog HDL?2018-10-16 1227
-
Verilog_HDL基础知识非常好的学习教程 (1)2017-01-04 796
-
Verilog HDL入门教程2016-07-15 1157
-
场效应管必须知道的基础知识!2016-06-08 1230
-
你必须知道的495个C语言问题2012-11-03 3464
-
【经典】你必须知道的495个C语言问题2012-08-02 14539
-
Verilog HDL华为入门教程2010-02-11 1201
-
Verilog HDL基础知识2009-05-31 503
全部0条评论

快来发表一下你的评论吧 !
