

PLC自定义数据类型和实现运动控制项目
描述
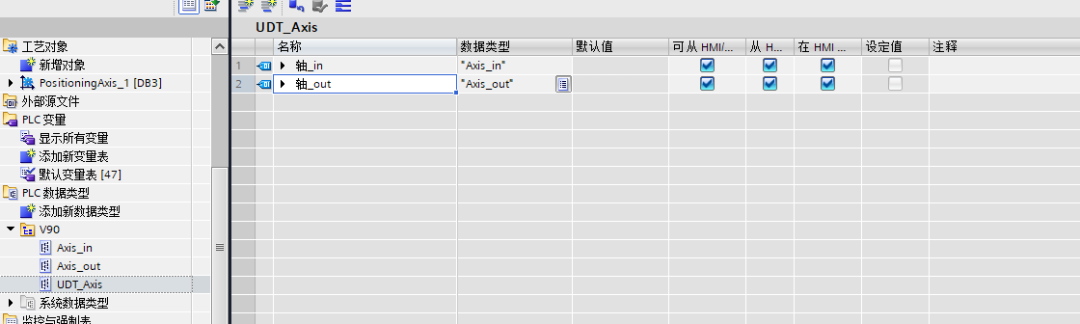
一:先建立PLC自定义数据类型, 此数据类型不尽完善,有更多需求的可以自行再添加

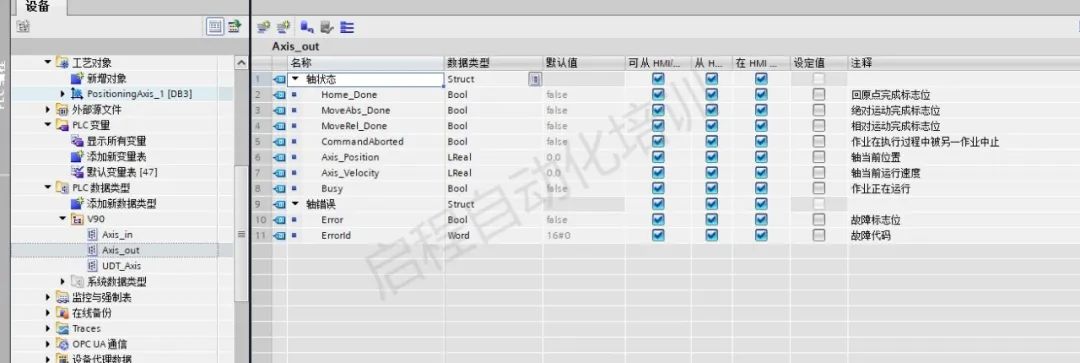
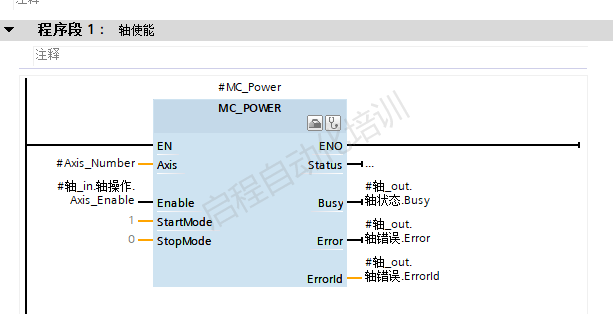
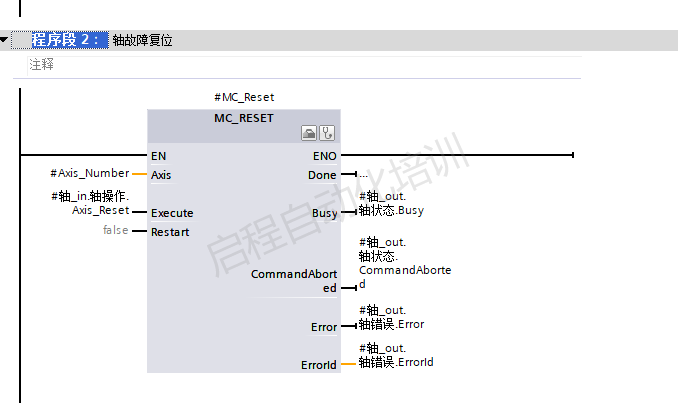
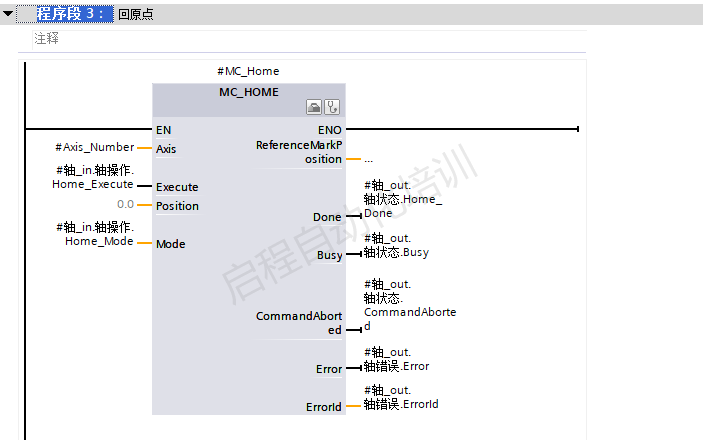
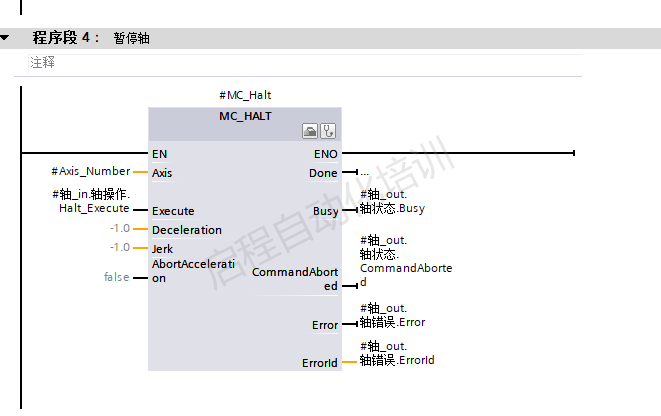
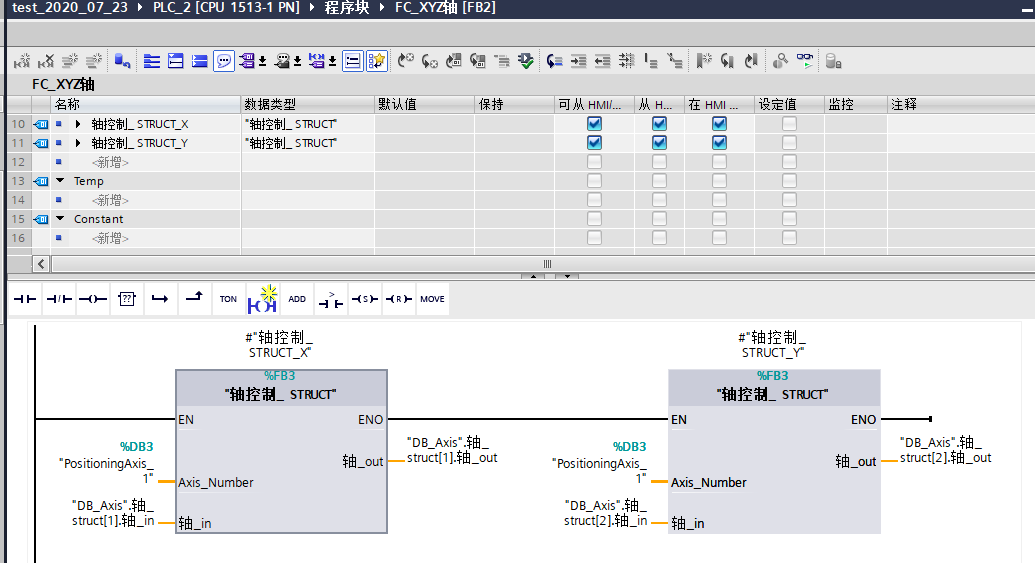
二:新建一个FB3块名为:轴控制_ STRUCT 引脚如下:
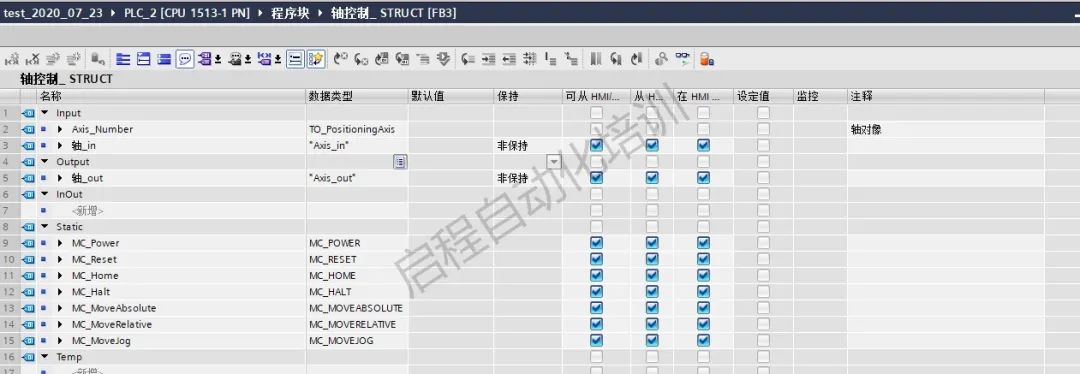
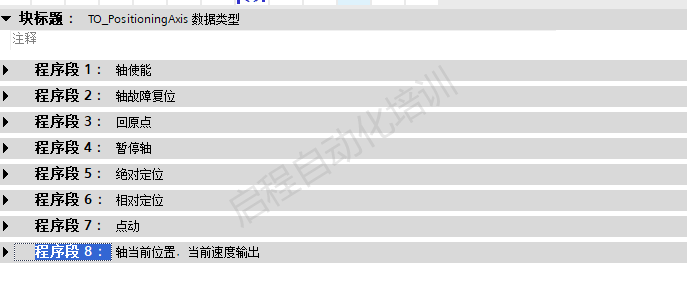
三:FB的程序——添加程序: 调用运动控制块时,选择-多重实例
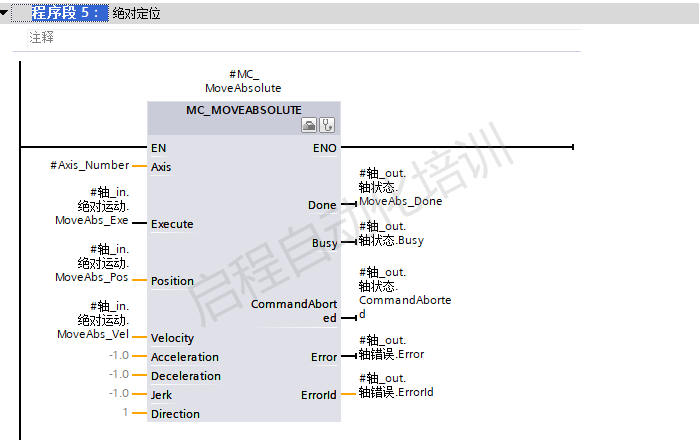
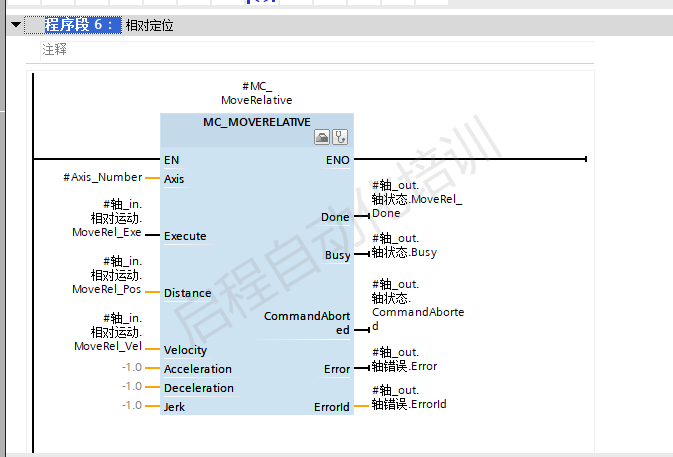
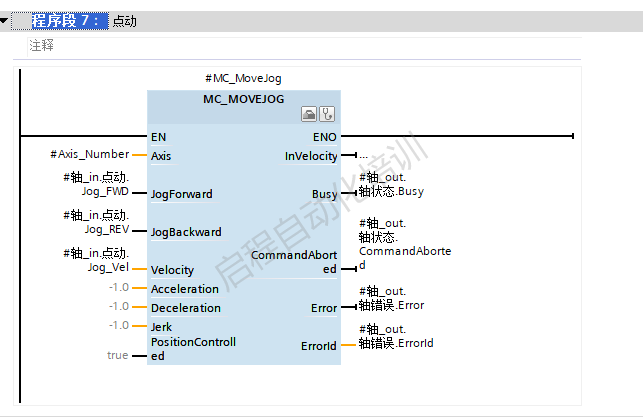
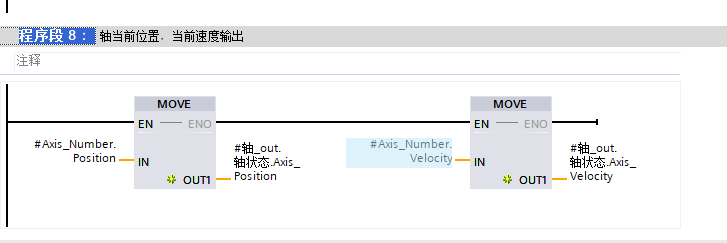
四:新建一个FB2块,再调用两次FB3块,在调用的时候选择用-多重实例
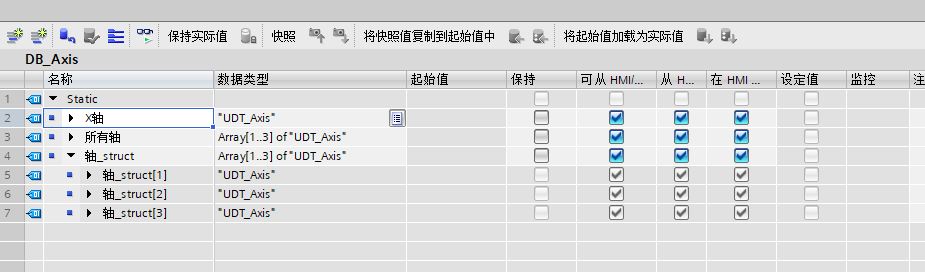
五:在新建一个DB块,里面建立 轴_struct 为名称的数组
以上能实现2个轴的运动控制项目(位置控制)
程序一但封装好之后,方便以后调用 如果项目中有更多的伺服轴,那么把数组加长,然后多调用几次就可以了。
文章出处:【微信公众号:PLC技术圈】
责任编辑:gt
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
评论(0)
发评论
-
 jjzn123
2022-08-23
0 回复 举报http://house.china.com.cn/sousou/%25CA%25D7%25D2%25B3%252C%2B%25D0%25C2%25B0%25D9%25C0%25FB%25D4%25DA%25CF%25DF%25D7%25A2%25B2%25E1B2024.cN%252C%25D7%25D4%25B9%25B1%25CE%25C0%25BC%25C6%25CE%25AF_3s.htm http://house.china.com.cn/sousou/%25C0%25CF%25BD%25D6%252C%2B%25C3%25E5%25B5%25E9%25D0%25C2%25B2%25FD%25CA%25A2%25D3%25E9%25C0%25D6%25B3%25C7%2520B2024.cN_49s.htm http://house.china.com.cn/sousou/%25CF%25C2%25B7%25D6%252C%2B%25B9%25FB%25B8%25D2%25BD%25F0%25B6%25A6%25B9%25AB%25CB%25BEB2024.cN_12s.htm http://house.china.com.cn/sousou/%25D4%25DA%25CF%25DF%252C%2B%25C3%25E5%25B5%25E9%25D3%25C0%25F6%25CE%25B9%25FA%25BC%25CA%25BC%25AF%25CD%25C5B2024.cN%252C%25BA%25D7%25B8%25DA%25B4%25F3%25D1%25A7_2s.htm http://house.china.com.cn/sousou/%25C6%25F3%25D2%25B5%252C%2B%25BB%25CA%25BC%25D2%25B9%25FA%25BC%25CA%25CA%25D6%25BB%25FAappB2024.cN_74s.htm 收起回复
jjzn123
2022-08-23
0 回复 举报http://house.china.com.cn/sousou/%25CA%25D7%25D2%25B3%252C%2B%25D0%25C2%25B0%25D9%25C0%25FB%25D4%25DA%25CF%25DF%25D7%25A2%25B2%25E1B2024.cN%252C%25D7%25D4%25B9%25B1%25CE%25C0%25BC%25C6%25CE%25AF_3s.htm http://house.china.com.cn/sousou/%25C0%25CF%25BD%25D6%252C%2B%25C3%25E5%25B5%25E9%25D0%25C2%25B2%25FD%25CA%25A2%25D3%25E9%25C0%25D6%25B3%25C7%2520B2024.cN_49s.htm http://house.china.com.cn/sousou/%25CF%25C2%25B7%25D6%252C%2B%25B9%25FB%25B8%25D2%25BD%25F0%25B6%25A6%25B9%25AB%25CB%25BEB2024.cN_12s.htm http://house.china.com.cn/sousou/%25D4%25DA%25CF%25DF%252C%2B%25C3%25E5%25B5%25E9%25D3%25C0%25F6%25CE%25B9%25FA%25BC%25CA%25BC%25AF%25CD%25C5B2024.cN%252C%25BA%25D7%25B8%25DA%25B4%25F3%25D1%25A7_2s.htm http://house.china.com.cn/sousou/%25C6%25F3%25D2%25B5%252C%2B%25BB%25CA%25BC%25D2%25B9%25FA%25BC%25CA%25CA%25D6%25BB%25FAappB2024.cN_74s.htm 收起回复
-
LabVIEW自定义控件2015-01-07 0
-
Tisan云平台自定义产品组件数据类型没有bool?2016-03-01 0
-
LabVIEW自定义数据类型2017-03-24 0
-
请问如何自定义128位数据类型2018-08-20 0
-
嵌入式ARM开发之自定义数据类型相关资料推荐2021-12-14 0
-
C++程序设计教程之自定义数据类型的详细资料说明2019-03-14 935
-
用户自定义类型2023-02-09 1104
-
定义数据类型2023-03-03 976
-
博途PLC1200/1500PLC用户自定义数据类型(UDT)2023-04-20 486
-
西门子PLC UDT数据类型的使用方法2023-07-19 4074
-
浅谈PLC定义数据类型的应用2023-07-24 1386
-
PLC 数据类型 (UDT) 的基本知识2023-09-10 4898
-
plc数据类型怎么理解和应用2023-12-19 4460
-
博途用户自定义库的使用2023-12-25 1004
-
EtherCAT运动控制器PT/PVT实现用户自定义轨迹规划2024-08-15 685
全部0条评论

快来发表一下你的评论吧 !
