

讲解SystemVerilog中对于process的多种控制方式
描述
Hello everybody,我们接着上期的Process(1)-产生进程的方式继续讲解SystemVerilog中对于process的多种控制方式。 本期黄鸭哥主要给大家讲解 named block、wait_order、wait_fork、disable,还有SystemVerilog中的内建类:process类。
1
Named block
Block,也就是语句块,SystemVerilog提供了两种类型的语句块,分别是begin…end为代表的顺序语句块,还有以fork…join为代表的并发语句块。 这两种block都是工程项目中常用的block,但是,大家可能都不知道block也是可以命名的,就像我们每个人的名字一样,名字是我们每个人的一个标识。 通过这个标识,我们可以访问block中的变量、parameter等。
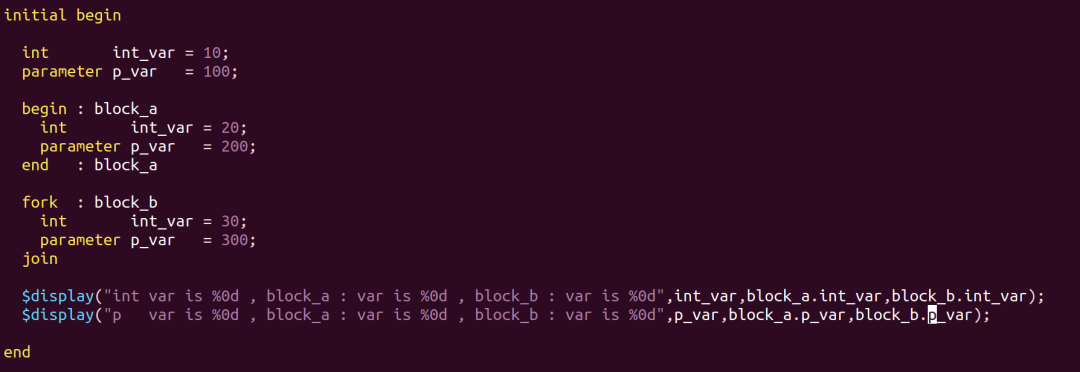
图1
图1中,initial begin…end中有两个named block,分别为顺序执行的block_a和并发执行的block_b。
我们可以通过在block的开头和结束编写上标识名,也可以只在开头进行编写;
如果是在block的开头和结束都有对应的标识名,则这两标识名必须相同,否则会编译报错。

图2
从图1和图2中我们还可以看到,int类型的变量和parameter的作用范围都是在各自block范围内的。
所以,我们要记住,如果需要访问block中的变量或者parameter,则需要给block进行命名,并且,block中的变量、parameter都是相互独立的。
2
wait_order、wait fork
SystemVerilog提供了两大类process的控制方式,分别为wait和disable。 wait中又包含了三小类:wait、wait_order、wait fork。 其中,wait相对简单,在这就不说了,黄鸭哥只介绍后两种。 那么,什么是wait_order? 黄鸭哥总结一句:wait_order会阻塞等待多个事件的触发,并且要求这几个事件间发生的顺序和设置的一致。 这句话该怎么理解呢?我们来看下例子:
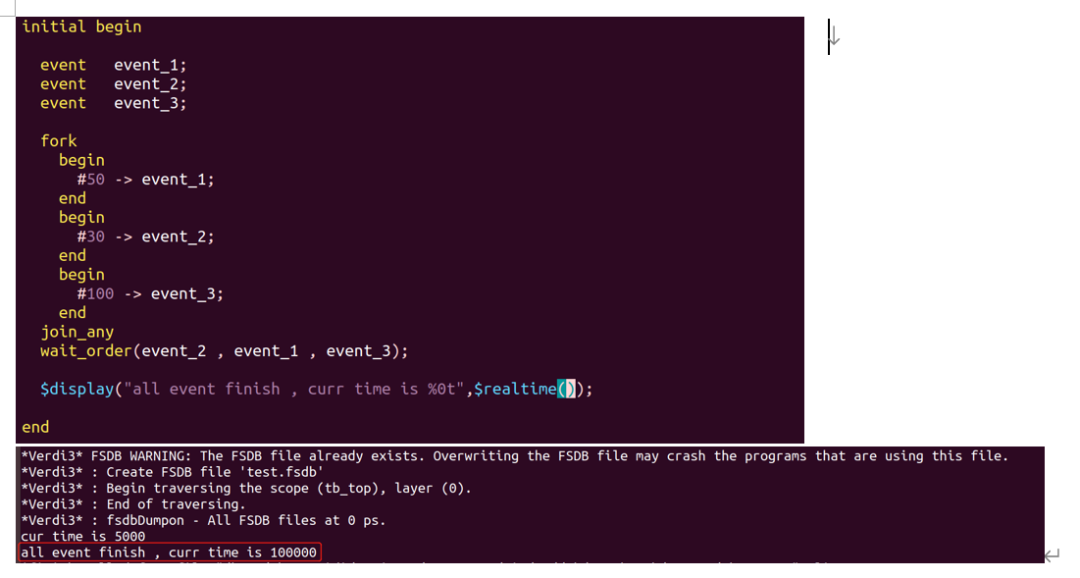
图3
例子中包含3个event,3个event分别在3个并发进程中进行触发,event_1在第50个timeunit被触发,event_2在第30个timeunit被触发,event_3在第100个timeunit的时候被触发。
wait_order需要阻塞到3个事件依次按照event_2、event_1、event_3的顺序进行触发后才能往下执行。这就是wait_order的用法。
wait中另外一个重要的用法是wait fork,关于它的用法,黄鸭哥总结了三句话:
① wait fork会引起调用进程阻塞,直到它的所有子进程结束;
② wait fork的目的是用来确保所有子进程执行结束;
③ wait fork作用父进程下的子进程,而不包括子进程下的子进程。
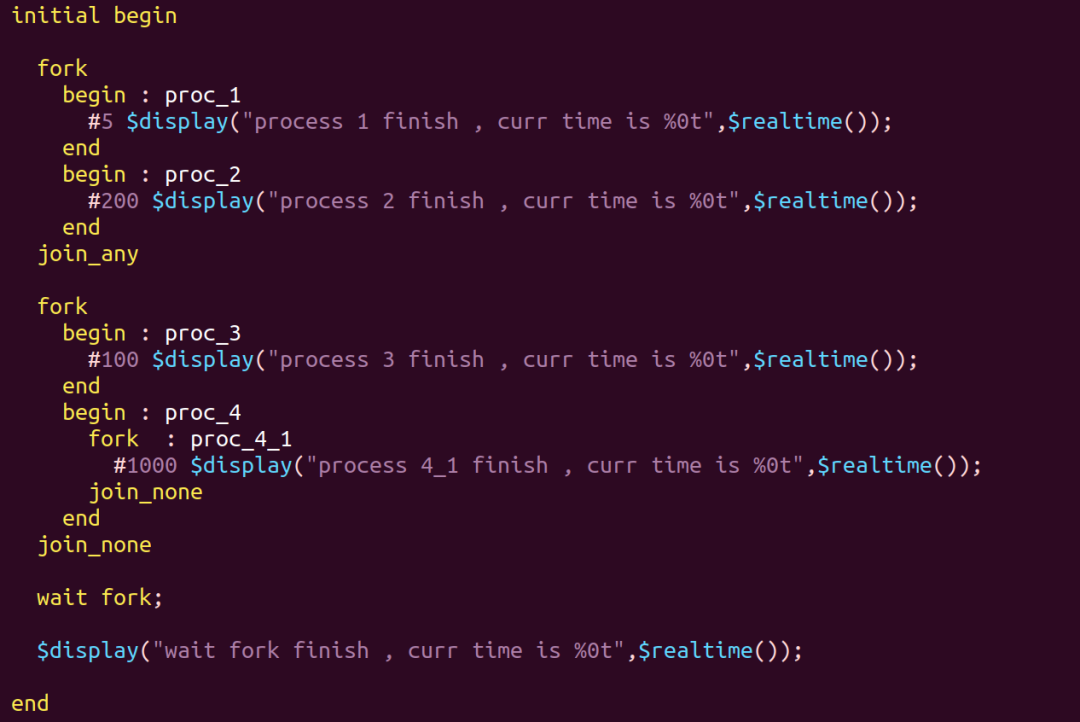
图4
图4中initial语句块包含4个子进程,proc_1~proc_4。
其中,proc_4子进程中还含有一个子进程proc_4_1,此进程就是initial语句块的子进程的子进程。
按照上面黄鸭哥总结的三点来看,wait fork应该只需要等待到第2个子进程:proc_2执行结束,因为wait fork只会作用到子进程,不会作用到子进程的子进程(不论是fork…join,fork…join_any还是fork…join_none产生的进程)。
我们来看下仿真结果验证下我们的理论:

图5
果然,wait fork只等待到proc_2,在第200个timeunit就打印出了“wait fork finish”。
3
disable 、disable fork
上面说完了wait,我们接着说SystemVerilog中第二大类的进程控制方式:disable。 disable语句常用的多种方式包括:disable named_block、disable task_name和disable fork等,调用disable语句将会终止指定的进程。
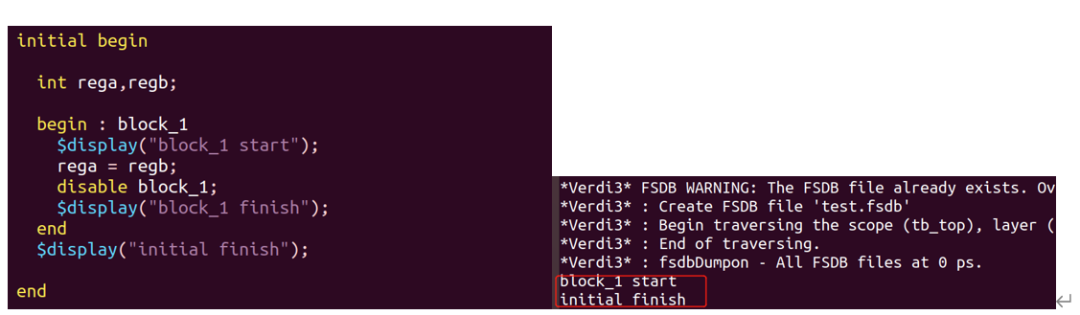
图6
图6里调用了disable,终止了对应的带标识名的block,从仿真截图中可以看出,block_1并没有正常结束,而是中途被终止了。
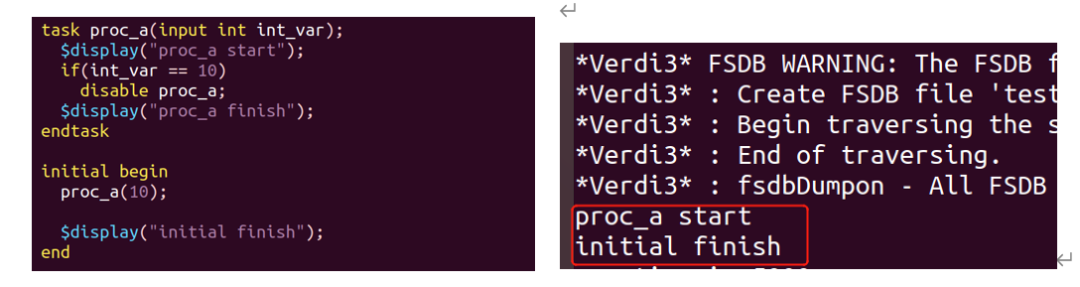
图7
上图中disable proc_a相当于return,它会直接终止当前的task。
而关于disable fork,这个是我们工程项目中使用的最多的一类,也是最容易踩坑的一类,disable fork的用法我推荐大家学习下Q哥的一篇文章:disable fork,你真的会用吗?
感兴趣的同学可以点进去看看,他在里面有很详细的描述,黄鸭哥在这里就不多说了。
4
内建类:process
SystemVerilog中内建了一种class,可以对进程进行访问和控制,此种class就是process,我们先来看下process类的原型:
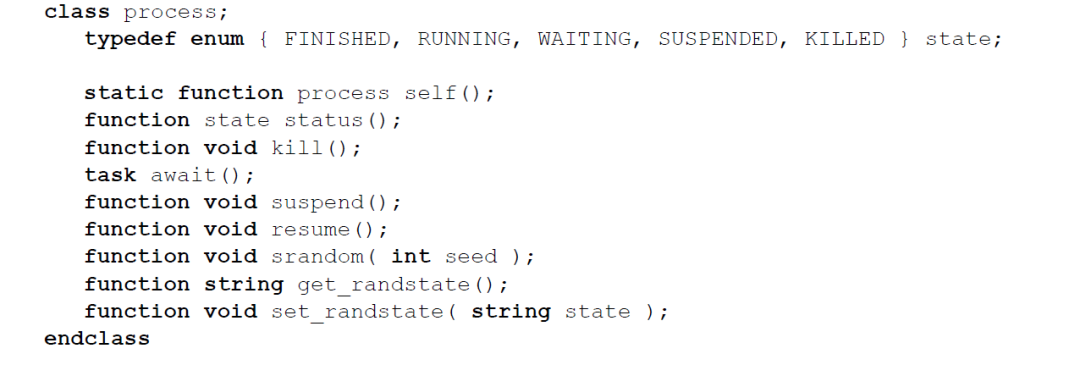
图8
process类中定义了一个枚举变量state,表示当前进程的几种执行状态:FINISHED,RUNNING,WAITING,SUSPENDED,KILLED。
另外,还声明了几种task和function,我们通过下面的表格来简单了解下:
表1
有人会问了,这么多的method,我们都该记住吗?
黄鸭哥觉得不是的,只需要记住这里面常用的几个method:self(),status(),kill()就可以了,我们最后再来看个例子,加深下理解:
| Method | Describe |
| self() | 获取当前进程的句柄,process类不能主动的通过new来进行创建,只能通过initial…begin…end,final…begin…end,4个always procedure,3个fork procedure和dynamic process来产生 |
| status() | 获取当前进程的状态:FINISH: 该进程已经结束了RUNNING: 该进程正在运行WAITING: 该进程等待阻塞条件SUSPENDED:该进程停止了,等待resume,当前状态只能通过调用process类中的resume函数来解除KILLED: 该进程被强制终止了 |
| kill() | 终止该进程以及该进程的子进程 |
| await() | 等待其他进程结束,不能在该进程中,调用该方法,只能是别的进程调用本进程的await()来阻塞本进程 |
| suspend() | 挂起该进程 |
| resume() | 恢复该进程 |
| srandom(int seed) | 设置进程的随机种子 |
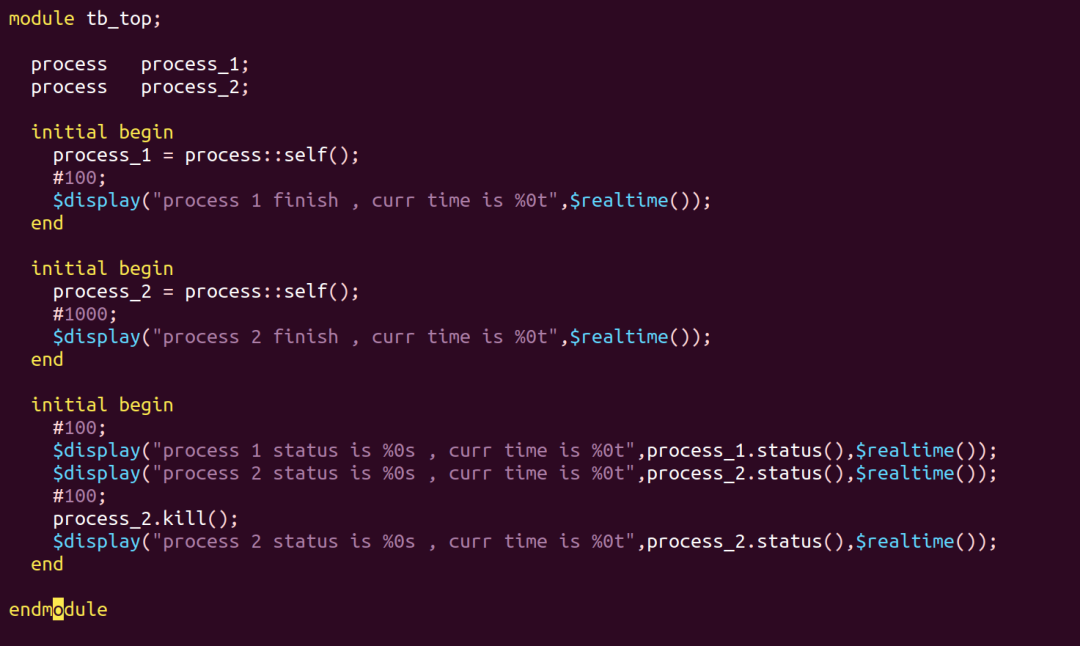
图9

图10
图9展示了这三个method的用法,通过self()获取进程的句柄,然后传递给定义的两个process类;
调用status()可以获取到process_1和process_2进程的执行状态,在100个timeunit的时候,process_1已经执行结束,而process_2则处于阻塞状态;
当再次经过100个timeunit时,调用kill()终止了process_2的继续执行,从这里可以看出,要终止一个进程,除了disable、disable fork之外,还可以调用process.kill()。
总结
process就讲到这了,我们再回顾下今天的要点: 1、block可以进行命名,命名之后就可以通过标识名访问block内部的变量和parameter,还可以通过disable named_block终止此block。 2、进程的两大控制方式:wait、disable。 3、SystemVerilog内建类,process类,可以通过process类访问进程和控制进程。 4、三种终止进程的方式:disable、disable fork、process.kill()。 审核编辑 :李倩
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
SystemVerilog中的联合(union)介绍2023-10-08 2727
-
SystemVerilog的覆盖率建模方式2023-06-25 2632
-
Systemverilog中的Driving Strength讲解2023-06-14 2851
-
SystemVerilog中的Semaphores2022-12-12 4548
-
SystemVerilog中的“const”类属性2022-11-29 2627
-
SystemVerilog中的Virtual Methods2022-11-28 1230
-
SystemVerilog中的Shallow Copy2022-11-21 1657
-
SystemVerilog中的package2022-11-07 2022
-
SystemVerilog中可以嵌套的数据结构2022-11-03 2979
-
SystemVerilog中$cast的应用2022-10-17 4228
-
SystemVerilog中对于process的多种控制方式2022-09-14 2012
-
使用SystemVerilog来简化FPGA中接口的连接方式2021-01-08 1927
-
CSS对齐方式的详细讲解2020-12-24 2114
-
简单讲解Atmel Studio 6中SVN插件的使用方式2018-07-04 2720
全部0条评论

快来发表一下你的评论吧 !
