
资料下载


用于3D扫描的嵌入式图像预处理
李鸿洋
分享资料个
描述
当我们想通过 3D 扫描进行三元重建时,通常最好的方法之一是通过激光三角测量技术
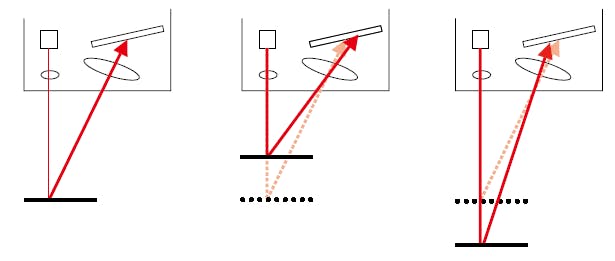
众所周知,这项技术包括将激光条投影到物体表面并以已知角度捕获该投影的图像,然后通过图像处理将该条带转换为代表物体横截面切割的对齐方式点云中物体的三维表面
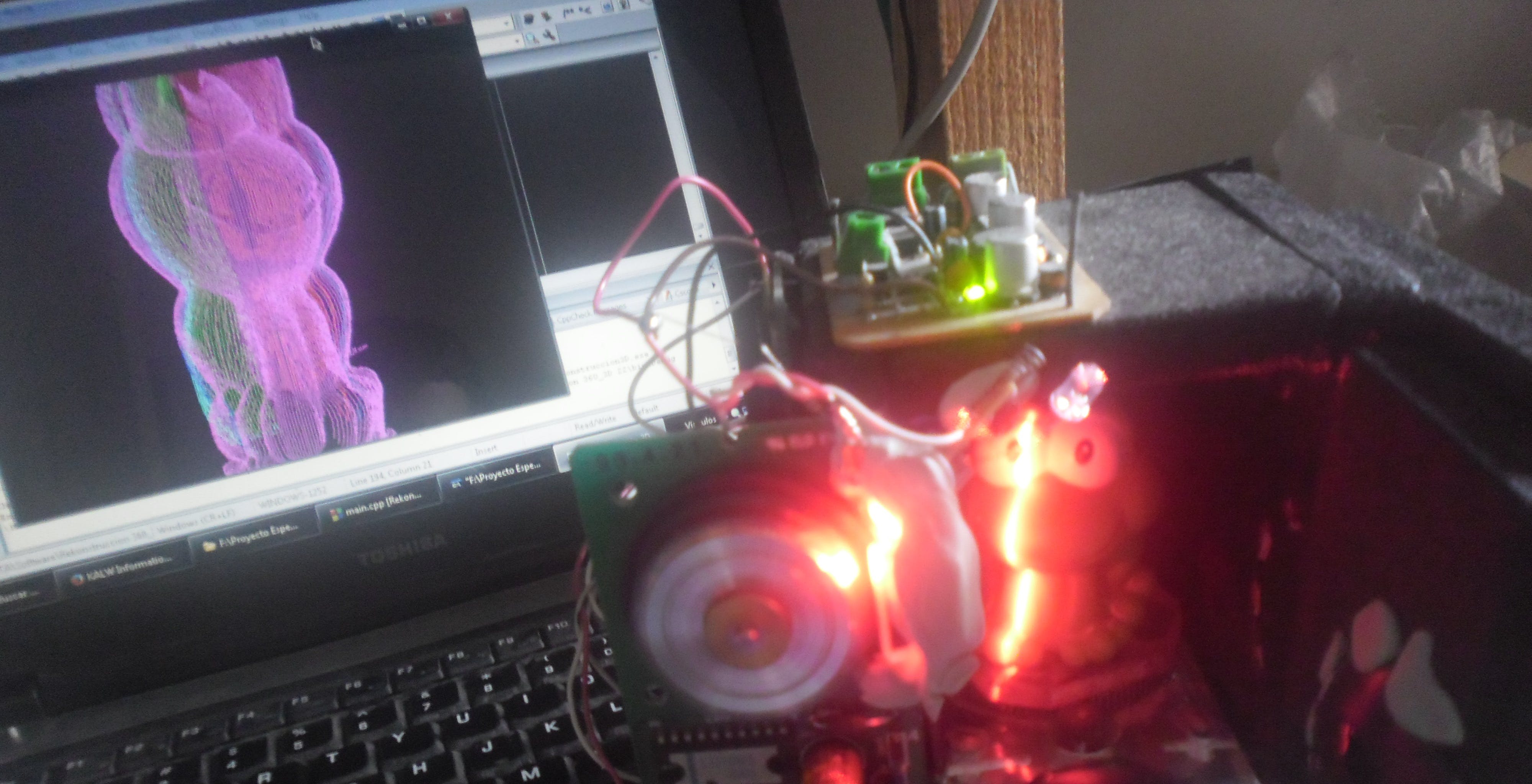
因为在这个项目中,我们将专注于通过ov2640相机捕捉投射在物体上的激光条的图像,通过DCMI (数码相机机器接口)和DMA (直接存储器访问)获取其图像数据,对图像进行预处理微控制器stm32F407VGT并通过FSMC (柔性静态存储器控制器)将其传输到LCD
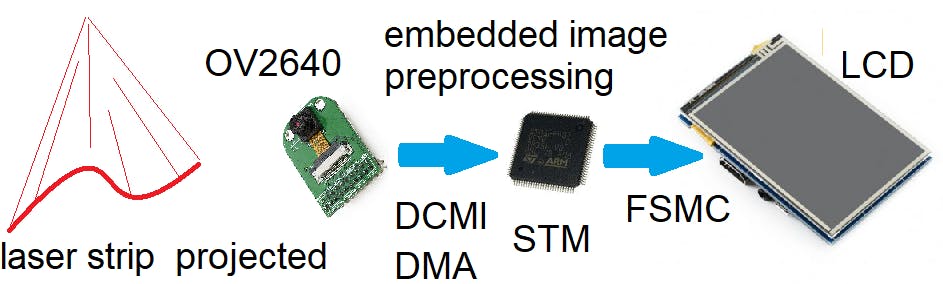
作为该系统的主要目标是捕获图像,并对它们进行嵌入式预处理以检测投射的激光条纹,并将这些检测到的激光条纹的数据仅传输到 PC 以生成点云(点的 xy 坐标每个捕获的图像平面中的激光条纹相当于其 3D 模型的横截面),而不是向 PC 提供每个图像的所有信息,以便它只负责收集专门的条纹数据并生成对象的 3D 点云

强调这一切的目的是让计算机而不是每个要处理的图像,只接收每个横截面的激光条点的 XY 坐标,这样 PC 才开始以 3D 方式组装点云一段一段的(就像把一块面包放在一起,每一片相当于每张图像的预处理)
这是如何工作的
步骤1:
微控制器及其外围设备的初始化
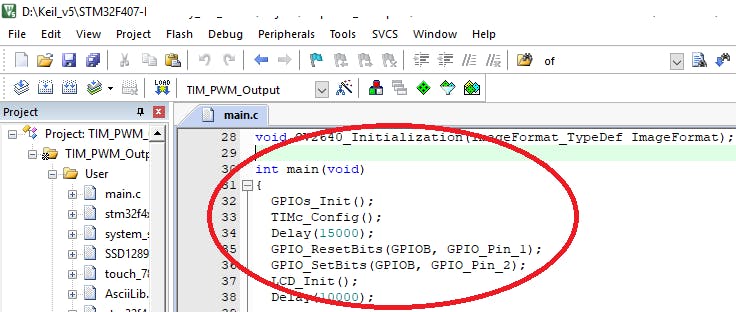
第2步:
液晶显示器初始化
LCD_Init();
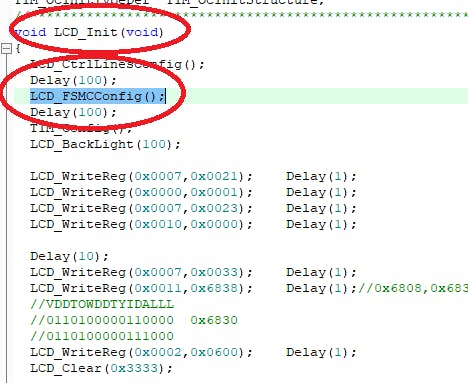
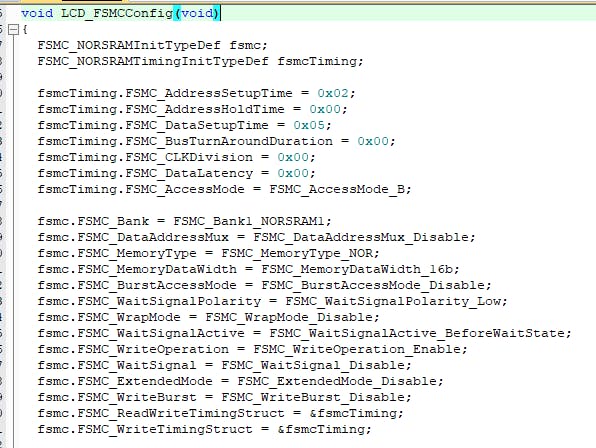
在LCD初始化函数中可以看到是FSMC初始化函数
它负责初始化和正确激活 FSMC(灵活静态内存控制器),以更高效、更强大地处理 LCD
第 3 步:
相机初始化
OV2640_HW_Init();
使用这个库的功能,我们初始化我们想要的相机,我们让它在连续模式下工作以提取图像 con el DCMI

这是一个非常强大的外围设备,专门用于与相机通信并获取其图像
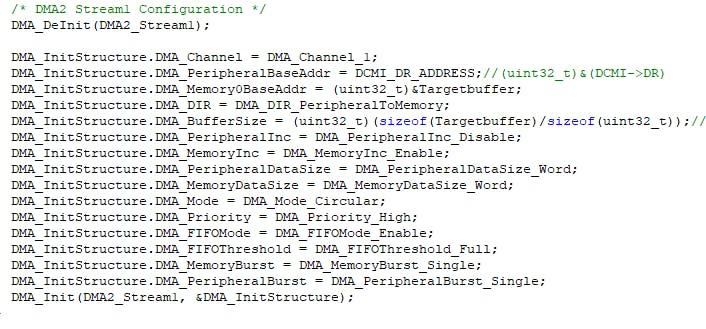
借助 DMA,相机捕获的图像信息直接从相机通过 DMA 传递到其目标地址,而无需将工作加载到微控制器的核心,这是通过独家选择获得激光条点的最简单方法红色(在 DMA 分配的内存缓冲区中,用于放置每个捕获的图像的数据)以立即阈值这些值,并且只有当它们通过某个值时,才会将每个点的 XY 字符串传输到 PC 以进行组装点云
通过将微控制器选择的每个图像的所有红点坐标与嵌入式图像预处理放在一起,在 PC 上使用 GLUT 武装点云
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





