

3D芯片封装晶圆植球装备关键技术研究
制造/封装
描述
刘劲松 郭 俭
(上海理工大学 上海微松工业自动化有限公司)
摘要:
为了应对半导体芯片高密度、高性能与小体积、小尺寸之间日益严峻的挑战,3D 芯片封装技术应运而生。从工艺和装备两个角度诠释了 3D 封装技术;介绍了国内外 3D 封装技术的研究现状和国内市场对 3D 高端封装制造设备植球机的需求。介绍了晶圆植球这一 3D 封装技术的工艺路线和关键技术,以及研制的这一装备的技术创新点。以晶圆植球机 X - Y - θ 植球平台为例,分析了选型的技术参数。封装技术的研究和植球机的研发,为我国高端芯片封装制造业的同行提供了从技术理论到实践应用的参考。
0 引言
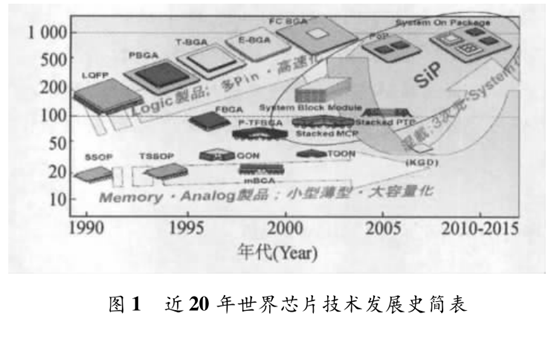
3D 芯片封装技术在组装密度、信号传输速度、电性能及可靠性方面的独特优势,目前已成为能最大限度地提高芯片集成度和提高高速单片 IC 性能,制作高速电子系统,实现终端产品小型化、多功能化、高可靠性和高性能的最有效途径。3D 封装的主要优势为:具有最小的尺寸和质量,将不同种类的技术集成到单个封装中,用短的垂直互连代替长的 2D互连,降低寄生效应和功耗等。
国际上公认最具商业价值的芯片就是 BGA/WLP(Ball Grid Array/Wafer Level Package)等 3D 封装形式的处理器产品,美国 TI 为全球最大生产商。3D 芯片封装最主要的设备及工艺就是植球设备和工艺,目前该项技术和设备均被国外公司所垄断,其进口设备售价昂贵、售后技术支持效果不佳,严重影响了我国芯片厂的产品换代升级进程。掌握这项技术并研发出晶圆级植球机具有重大战略意义,将推动我国3D 芯片封装技术的发展。这一国内设备及工艺技术的诞生将改变国产芯片厂为外资品牌低端来料加工的历史,可以生产中国自主品牌的芯片。
1 国内外产业技术现状分析
高密度 3D 芯片封装技术是国内外近几年飞速发展的微电子封装技术。叠层型 3D 封装是应用最广泛的一种,各层互连可以是线焊、倒装焊、硅通孔或是这三种方式的混合。不管是哪种具体的实现形式,3D 封装有几个共性的难点:凸点制作、通孔制作、芯片减薄和划片、散热及电路性能等。目前,3D层叠中的微焊点主要使用超细间距和高密度凸点阵列实现。晶圆上形成凸点有三种形式:电镀方式、印刷锡膏固化方式和植球方式。电镀方式具有造价贵、制造周期长、环境污染、工艺复杂和参数不稳定等缺点;印刷锡膏方式不容易控制凸点高度,很难制作小于 200 μm 的凸点。植球方式工艺稳定。目前,材料厂商可以提供质量稳定的 60 ~ 250 μm 的锡球用于量产。2002 年从 Intel 公司首倡推广使用晶圆植球技术开始,正逐渐被大多数客户所接受,这种方式的成本也随焊球和设备价格的下降而迅速下降,更具性价比优势。层叠后的芯片与 PCB 等载体相连时,又广泛运用到 BGA 基板植球技术。
晶圆级微球植球机及周边的微芯片检测提取设备和 BGA 基板植球机设备的技术和专利近乎全部掌握在国外厂商手中,技术标准由国外公司制定;国内企业研发工作面临国外厂商的技术封锁。针对该类设备的相关专利保护,具体进行了深入的研究工作,研发了新的实现方式,设计新型的结构,申请专利保护我们的知识产权,并且已经有几款发明专利获得受理和授权。
2 我国市场需求分析
早在 20 世纪 60 年代,美国和日本就开始研究BGA 植球技术,并在 20 世纪 90 年代末开始出现BGA 封装规模化生产。晶圆级微球植球机的技术源自基板植球机。我国内资企业在 2008 年左右引入首套 BGA 基板植球机,2010 年就开始了晶圆植球机的采购。
晶圆级微球植球机和 BGA 基板植球机是高端IC 封装设备的关键设备之一,可以和前后设备组成完整的 3D 芯片封装生产线。随着网络通信领域技术的迅猛发展,数字电视、信息家电和 3G/4G 手机等产品大量需要高端 IC 电路产品,进而对高引脚数的 MCM、BGA、CSP、SiP、PiP、PoP 等 3D 芯片封装中高端产品的需求十分旺盛。
保守估计,2013 年全球半导体设备市场较 2012年将萎缩 6% 左右;然而我国半导体专用设备市场将继续增长,预计达到 40 亿美元规模。封装测试设备占国内半导体专用设备市场在 40%以上,超过 16亿美元。其中约 10%为 3D 芯片封装植球设备这样的高密度高端 IC 封装设备,而且逐年迅猛增长。晶圆植球机全球 2013 年销售预期将达到 20 条线并将保持年均 25% 以上的增长。中国大陆封装厂刚开始采用此类技术,设备需求持续强劲增长,预计中国大陆市场将保持 30%以上的年均增长,具有良好的市场前景。
3 装备设计目标及技术工艺路线
装备设计目标是研究晶圆植球技术及设备并实现产业化,具体研制用于 3D 芯片封装的晶圆级微球植球设备的系统结构与功能,设计出简洁而可靠的能够实现稳定、高良率植球的机构,完成具有自主知识产权和多项专利技术的晶圆级微球植球机和并产业化,打破国外技术封锁。设备技术指标达到世界同期水平,并提供给国内大型封测骨干企业进行验证生产。
晶圆级微球植球机主要产品技术指标如下。硅片尺寸:6/8/12 inch;最小端子间距:200 μm;锡球直径:Ф100 μm ~ Ф500 μm;UPH:20;印刷和植球对位精度: ±30 μm;植球成功率:99. 995%。
以上主要技术性能指标为国际同期水平,上海微松公司针对该类设备的技术研发已经获得多项授权专利,拥有发明专利的晶圆级微球植球用弹性体压入装置、微球自动收集及供球循环设备、BGA 基板植球用焊球定位自动供给机构等技术,克服了一些国外设备具有的缺点和不足,具有更高的性价比。
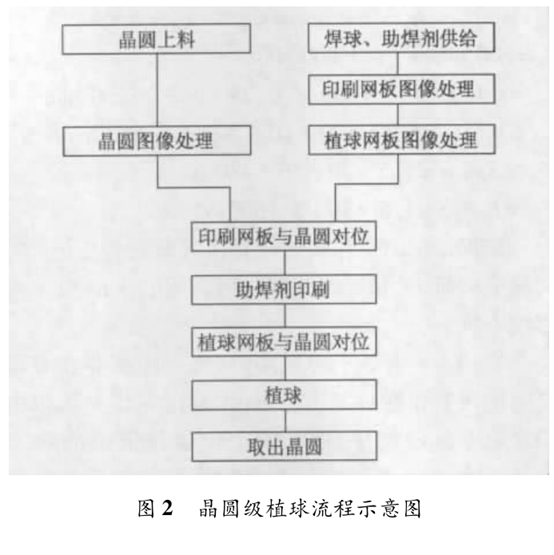
晶圆级微球植球机工艺和技术路线如下。
(1)将晶圆盒放置到上料位后,机械手自动抓取晶圆进行预对准后放置到工作台上;
(2)助焊剂和焊球的上料;
(3)图像处理系统对晶圆和网板进行认识和处理,计算晶圆与印刷网板/植球网板的对位信息;
(4)根据视觉认识的处理结果把晶圆和印刷网板对位,执行助焊剂印刷;
(5)自动清洗机构对印刷网板进行清洗;
(6)根据视觉认识的处理结果把晶圆和植球网板对位,执行植球;
(7)自动清洗机构对植球网板进行清洗;
(8)机械手自动将晶圆从工作台上抓取,放回晶圆盒中。具体流程如图 2 所示。
4 关键技术分析
3D 芯片封装植球装备技术的研发解决了国内产业急需的关键技术,形成了如下创新点。
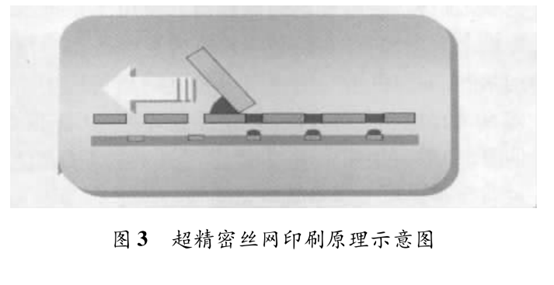
4. 1 超精密丝网印刷技术
晶圆级植球工艺中,丝网印刷用网板是微米级的薄板,晶圆和刮刀与网板的接触都会造成印刷网板的弹性变形。需要对这种变形加以控制、寻找合适的工艺参数并最终实现精确的助焊剂印刷量控制并实现微米级的印刷精度,如图 3 所示。
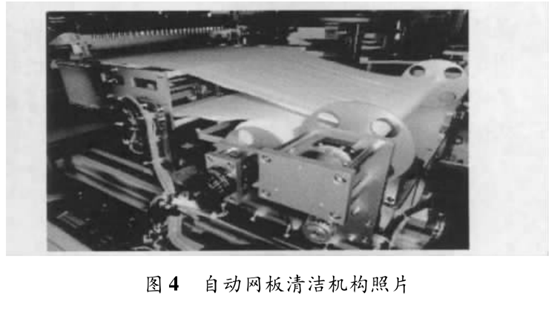
4. 2 自动网板清洁技术
需要设计全自动的清洁纸传送和清洁液供给系统,实现对印刷网板和植球网板的自动清洗,以保证最终的植球质量,如图 4 所示。
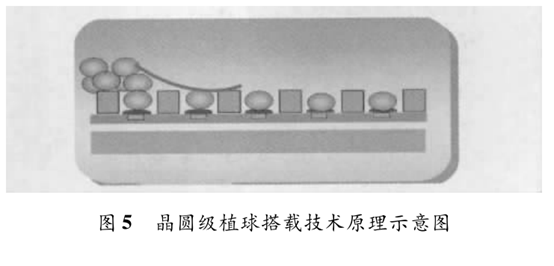
4. 3 晶圆级微球搭载技术
通过研究球径、晶圆尺寸和压力的关系曲线,研究测量反馈系统的误差校正算法,设计实现 Z 轴压力的精确控制以实现良好的植球效果。研究焊球流量与植球效果的匹配关系,设计实现焊球的自动供球、回收和循环系统。原理示意图,如图 5 所示。
4. 4 生产管理系统软件
一个大系统在运行过程中,需要为操作人员提供各种数据和参数,也需要为生产中的各项指标提供可追溯和分析数据库;因此生产管理系统软件也是核心技术。
4. 5 精密定位系统与算法
0. 1 μm 的分辨率,1 μm 的绝对定位精度,2 m的有效行程,定位技术的成熟与否决定了系统的可靠性。本装备的 X - Y - θ 植球平台是整个系统的基础,下面将用一个章节分析其特点与选型。最多 50 轴(电机)同时控制,在控制各种电机(直线,伺服,步进)的同时,采集传感器过来的 I/O 信号。运动控制算法也是系统研发的核心技术。
5 X - Y - θ 植球平台的选型
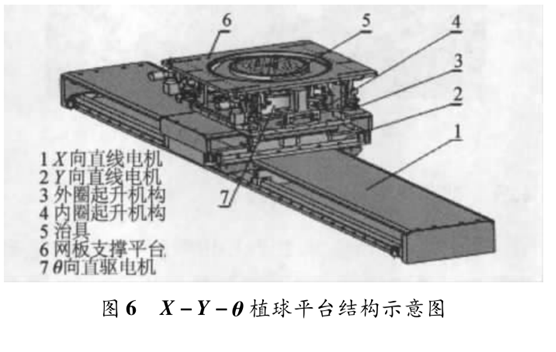
X - Y - θ 三自由度植球平台是晶圆级微球植球机核心工作单元,主要由直线电机、DD(直接驱动)电机、内外圈同步带起升机构、网板支撑平台和精密支撑治具组成,可分别对 6 英寸、8 英寸和 12 英寸晶圆进行高精度定位,完成印刷和植球动作,结构如图 6 所示。其对应的搭载建模技术是晶圆植球机的关键技术。下面详细分析 X - Y - θ 植球平台搭载建模过程以及重复定位与绝对定位误差计算。
精密支撑治具上等径阵列出若干小孔,真空吸住晶圆,由θ 向 DD 电机驱动,其技术参数如下。
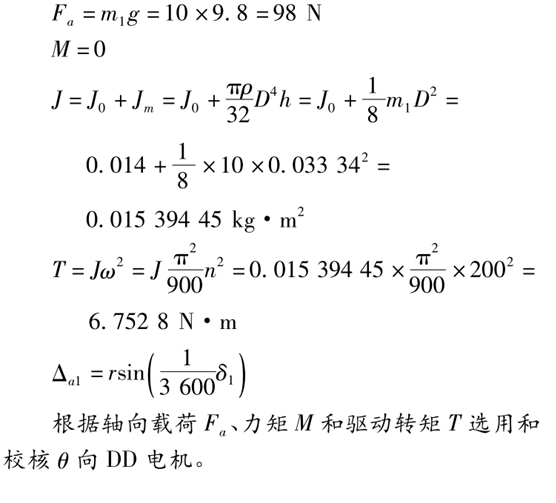
负载和 θ 向 DD 电机由直线电机驱动,其工作模式如图 7 所示;误差分析示意图如图 8 所示。
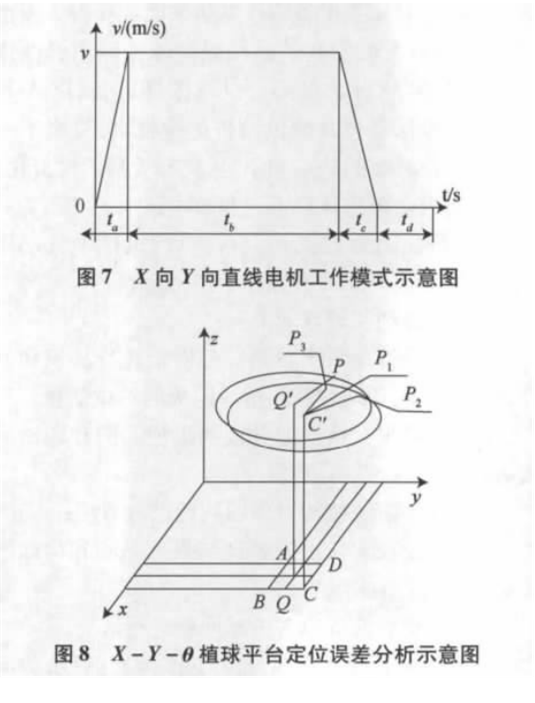
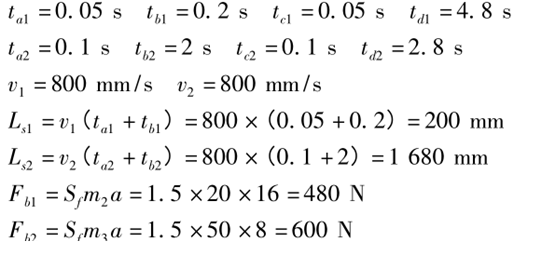
根据设定的工作模式计算出有效行程 L s1 和 L s2与峰值载荷 F b1 和 F b2 ,分别选用合适的 Y 向和 X 向直线电机。
X - Y - θ 植球平台联动时,每一向都存在着重复定位误差和绝对定位误差,重复定位误差可以由程序原点复归解决,而绝对定位误差很难消除,X向、Y 向和 θ 向绝对定位误差的累积将导致植球机植球失败。理论上 X 向进给 x 0 mm,Y 向进给 y 0 mm,θ 向旋转 θ 0 °,距离晶圆中心 Q'点的 r 0 处某一植球点坐标为 P(x 0 ,y 0 ,z 0 )。而实际上,X 向和 Y 向进给动作完成后,晶圆中心 Q'点可能是 C'点,这是由于X 向和 Y 向绝对定位误差的累积造成的。其实,晶圆中心是 C'点只是其中一种可能,X 向和 Y 向联动的绝对定位误差是整个矩形 ABCD,那么晶圆中心可能是其对应的矩形 A'B'C'D'内任意一点(包括边界),图中未作出。θ向旋转动作后,理想状态下,植球点 P 只偏移到了 P 1 点,事实上,由于θ 向也存在着绝对定位误差,这将导致 P 1 点偏移到圆弧P 2 P)3 上任意一点。以极限位置 P 2 ,讨论X - Y - θ 植球平台联动累积绝对定位误差δ。设P 2 (x 2 ,y 2 ,z 2 ),旋转矩阵为 R,平移矩阵为 T,植球允许误差[ ] δ ,锡球直径 d,则


6 结论与展望
通过详细阐述 3D 芯片封装植球装备技术的总体工艺流程和技术要求,特别是对晶圆植球机和BGA 基板植球机的原理和技术规格的重点介绍,希望对我国自主发展高端芯片封装业具有指导意义。从工艺和装备角度为国内同行贡献了详细严谨的专业知识。
(1)3D 芯片植球是高端 WLP/BGA 封装必备的装备,此项技术是解决我国高端芯片不能自给局面的必要手段。
(2)上海微松公司联合上海理工大学已经掌握了该项技术,培养了一批开发设计人才,随着 8/12英寸晶圆级及 BGA 基板级的商品机的持续开发,我国在此领域的自主创新将进入深水区。
(3)我国封装设备市场巨大,关键技术却控制在外国企业的手中,突破封锁,发展民族产业是我们的重任。
审核编辑:汤梓红
-
晶圆级WLP封装植球机关键技术研究及应用2022-11-09 4534
-
HRP晶圆级先进封装替代传统封装技术研究(HRP晶圆级先进封装芯片)2023-11-30 4568
-
复杂电子装备潜隐性故障诊断关键技术研究2010-05-13 2428
-
晶圆凸起封装工艺技术简介2011-12-01 5479
-
混频器设计中的关键技术研究2015-12-21 993
-
基于IPSec的VPN网关关键技术研究2016-01-04 901
-
线性调频基带数字产生的关键技术研究2016-01-15 965
-
智能电网关键技术研究展望2017-01-17 1004
-
微波煤脱硫的关键技术研究2017-10-18 1456
-
微波煤脱硫关键技术研究2017-11-01 1251
-
晶圆对晶圆的3D IC技术2019-08-14 5405
-
BGA连接器植球工艺研究2024-07-15 761
-
揭秘3D集成晶圆键合:半导体行业的未来之钥2024-11-12 3047
-
【海翔科技】玻璃晶圆 TTV 厚度对 3D 集成封装可靠性的影响评估2025-10-14 740
-
紫宸激光锡球焊锡机:点亮芯片0.07mm激光植球新征程2025-11-19 1539
全部0条评论

快来发表一下你的评论吧 !
