

实时控制驱动阶段对于可靠的系统输出运行的重要性
描述
本文将讨论实时控制的驱动阶段(更新系统),以及为什么此阶段对于可靠的系统输出运行很重要。
例如,在电机驱动应用中,您可能会实时监控和测量速度、位置、扭矩和电机运行状况,以便启动、加速或调节动态速度,或让电机系统减速。同样,在半导体或电池测试设备中,您可以使用数模转换器以快速控制环路的方式发送准确的模拟信号,从而调整基于氮化镓 (GaN) 的服务器电源单元 (PSU) 在不同负载条件下的输出功率,或者对在电源中断期间驱动不间断电源中的金属氧化物半导体场效应晶体管 (MOSFET) 的栅极驱动器进行调整。在所有示例中,调制和调整实时控制系统的驱动(对于电机驱动、电池测试设备或电源单元等应用)都非常重要。
在运行期间,电机会经历不同的阶段,其目的是为了实现可靠的电机驱动。具体来说,电机运行可分为以下阶段:预启动、电机启动、开环、闭环和电机停止。闭环阶段为系统提供准确的实时反馈,因为此阶段会对各种变量进行持续监测,然后通过闭环响应方式进行驱动,如图 1 所示。

图 1:电机运行阶段
高效率
随着电气化程度的不断提高,支持多种电器和应用的能效标准越来越多,包括能源之星、80 Plus、ErP Lot 9 标准等。因此,务必要维持实时控制系统的高效率运转,以便在快速变化期间降低功耗和系统工作量。一个非常高效的系统可以实现更快的响应、更低的拥有成本和更长的使用寿命。
例如,扫地机器人需要根据电池电量更大限度地提高每次清扫的地板范围。它可以通过实时调整吸尘能力来实现这一点,因为它会检测到地板材料或碎屑量的变化,或者是否有物体卡在机器人中。由无刷直流 (BLDC) 电机驱动器驱动的真空抽吸电机需要尽可能提高效率,因为它的功耗来源很多,例如开关损耗、漏源导通电阻 RDS(on) 和 MOSFET 的压摆率。要降低这些功耗,可以采用提高压摆率、降低脉宽调制 (PWM) 输出频率、使用较低 RDS(on) MOSFET 驱动电机或使用不同的 PWM 调制模式(如单端)等技术。
在购买白色家电时,消费者更倾向于选择噪音更低的系统。BLDC 电机驱动器通过正弦以及最近的场定向控制 (FOC) 等控制技术实现了更好的声学性能,这些技术可以将磁通保持在 90 度,从而实现理想的电机效率。借助 TI 的单芯片无代码无传感器 MCF8316A BLDC 电机驱动器,系统设计人员可以通过连续 PWM 调制、死区时间补偿和可变换向模式等控制技术来尽可能降低可闻噪声。
图 2 展示了利用 MCF8316A 优化声学性能前后的可闻噪声比较结果。
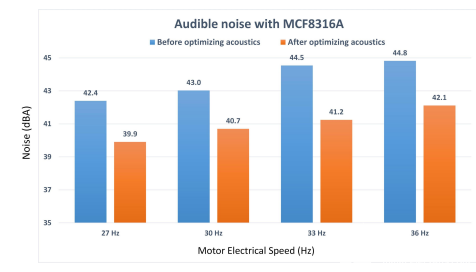
图 2:采用 MCF8316A 前后的可闻噪声比较
可靠性高
实时控制系统保护机制可在不可预测的恶劣环境中保障可靠运行,例如高温和低温环境,或者外部因素可能对系统产生电气甚至物理影响的环境。以可能包含移动器件的系统为例,例如电机驱动器。检测或预测转子锁定的能力有助于更大限度地减少功率损耗、器件故障或损坏。TI 的 MCF8316A 可在电机运行期间持续检查不同的电机锁定条件,并在检测到锁定事件时立即采取行动。此处列举一个真实的例子,当扫地机器人检测到物体(例如毛巾卡在其路径中)时,系统负载激增,这种情况会被系统判定为电机锁定状态,然后电机能够向相反方向旋转以松开物体并继续正常运行。
无代码的电机驱动器(例如 MCF8316)还可以管理重要功能(如电机故障检测),并实施保护机制,使整个系统设计更加可靠。
图 3 是典型 BLDC 实时控制电机系统的框图,在这种系统中,电压和电流检测电阻不断向控制器提供电机反馈(基于保护机制),然后控制器向电机驱动器发送不同的 PWM 信号以便相应地进行驱动。
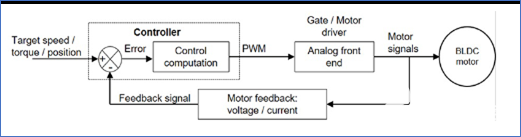
图 3:无传感器 BLDC 实时控制电机系统
精度
实时控制系统的精度对于可靠运行非常重要。典型的电机闭环系统依靠驱动器的处理速度来获得极高的速度精度和极短的延迟。此外,在您需要提供闭环反馈的实时控制系统中,电流检测放大器可在广泛的共模电压和温度范围内提供高水平的电流检测精度。
在用于睡眠呼吸暂停患者的持续气道正压通气 (CPAP) 机器等应用中,精确的实时控制系统会持续监控空气阻塞情况,并提供必要的空气来打开人的气道。另一个示例是 DLP® 投影仪应用,其色轮电机系统需要具有高速精度 (1%),以便投影仪在家庭影院投影仪等终端设备的屏幕上显示高品质的彩色图像,如图 4 所示。

图 4:DLP 家庭影院投影仪
结语
实时控制系统的驱动阶段取决于来自传感阶段的不同类型的反馈,不断监测系统条件的任何变化,然后将其发送到控制阶段以解读数据并发送下一个驱动命令。无论目的是通过死区时间补偿更大限度地减少可闻噪声、提供电机锁定检测功能,还是希望提供准确的速度,BLDC 电机驱动器在许多工业和汽车应用的驱动器中都发挥着重要作用。
审核编辑:汤梓红
-
提高DCS控制系统电源可靠性的方案2018-12-03 2582
-
Reset对系统稳定性有什么重要性?2020-03-11 2863
-
BGA焊接温度控制重要性2020-03-26 3133
-
绝缘测试的重要性2020-12-23 5307
-
串联谐振试验装置的重要性2021-01-19 8260
-
操作系统的重要性如何?2021-07-23 2473
-
电源对电子设备的重要性2021-08-11 2526
-
时钟的重要性2021-08-13 2175
-
时钟系统的重要性2021-08-20 2132
-
论调节阀的重要性2021-09-15 1767
-
在实时控制系统中使用传感器优化数据可靠性的3个技巧2022-09-07 1355
-
“实时控制”介绍及其重要性2022-10-28 797
-
CMTI参数对于隔离驱动器选型的重要性2022-10-31 709
-
如何在实时电机控制系统中实现高效、可靠且准确的驱动2022-12-05 1193
-
关于Windows实时性拓展对工业控制重要性的探讨2024-12-27 836
全部0条评论

快来发表一下你的评论吧 !
