

常用串行总线(一)——UART协议(Verilog实现)
接口/总线/驱动
描述
01UART基础知识
通用异步收发传输器(Universal Asynchronous Receiver/Transmitter),通常称作UART。它将要传输的资料在串行通信与并行通信之间加以转换。作为把并行输入信号转成串行输出信号的芯片,UART通常被集成于其他通讯接口的连结上。
具体实物表现为独立的模块化芯片,或作为集成于微处理器中的周边设备。一般是RS-232C规格的,与类似Maxim的MAX232之类的标准信号幅度变换芯片进行搭配,作为连接外部设备的接口。在UART上追加同步方式的序列信号变换电路的产品,被称为USART(Universal Synchronous Asynchronous Receiver Transmitter)。
1.1 早期串行通讯设备
早期的电报机器使用长度可变的脉冲信号(摩斯电码)进行数据传输,后来出现的电传打印机(teleprinters )使用5、6、7或8个数据位来表示各种字符编码。随着电传打印机的普及,最终发展成为计算机外围设备。
由于历史的发展原因,早期在Unix终端是一个名字为ASR33的电传打字机,而电传打字机的英文单词为Teletype(或Teletypewritter),缩写为TTY。因此,终端设备也被称为tty设备。这就是TTY这个名称的来源。
1.2 早期的芯片级UART
DEC(Digital Equipment Corporation)公司的Gordon Bell 为该公司的PDP系列计算机设计了第一个UART,不过体积庞大,UART的线路占据了整个电路板;后来DEC将串行线路单元的设计浓缩为早期的UART单芯片,以方便自己使用。西部数据(Western Digital)公司在1971年左右将其开发为第一个广泛可用的UART单芯片 WD1402A。这是中型集成电路的早期产品。
DEC是美国一家计算机公司;Western Digital是美国计算机硬盘驱动器制造商和数据存储公司。
1.3 现代串行通讯设备
2000年开始,大多数IBM或者相关的计算机都删除了其外部RS232的COM端口,将其替换为带宽性能更加出色的USB端口;对于仍然需要RS-232串行COM端口的用户,现在通常使用外部USB转UART转换器,常见的有CH340,Silicon Labs 210x的驱动程序,现在很多处理器和芯片都内置了UART。
02UART传输协议
2.1 UART协议
在串口通信中,数据在1位宽的单条线路上进行传输,一个字节的数据要分为8次,由低位到高位按顺序一位一位的进行传送,这个过程称为数据的"串行化(serialized)"过程。由于串口通信是一种异步通信协议,并没有时钟信号随着数据一起传输,而且空闲状态(没有数据传输的状态)的时候,串行传输线为高电平1,所以发送方发送一个字节数据之前会先发送一个低电平0,接收方收到这个低电平0以后就知道有数据要来了,准备开始接收数据从而实现一次通信。串口通信的时序如下图所示:
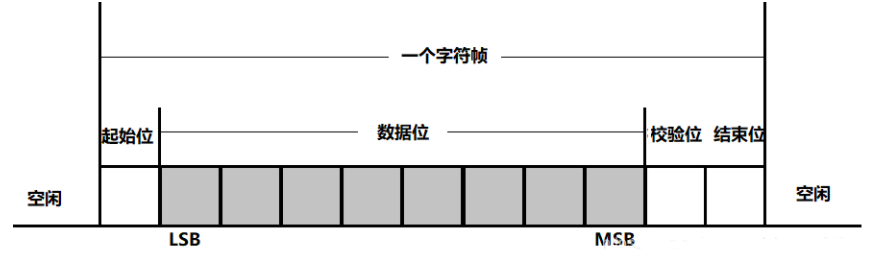
串口通信的规范如下:
1. 空闲状态(没有数据传输的状态)下,串行传输线上为高电平1;
2. 发送方发送低电平0表示数据传输开始,这个低电平表示传输的起始位;
3. 8-bit的数据位(1 Byte)是从最低位开始发送,最高位最后发送;
4. 数据位的最高位发送完毕以后的下一位是奇偶校验位,这一位可以省略不要,同时,当不发送奇偶校验位的时候接收方也相应的不接收校验位;
5. 最后一位是停止位,用高电平1表示停止位。
下面以发送字节0x55为例来说明整个的发送过程:
先把0x55转化成二进制为:01010101。显然0x55的最低位bit 0是1,次低位bit 1是0,……..,最高位bit 7是0,由于串口是从最低位开始发送一个字节,所以0x55各个位的发送顺序是1-0-1-0-1-0-1-0,波形如下图所示:

下面在给出一个波形,根据上面的规则也可以很容易判断这是发送字节0x13的波形:

2.1.1 起始位
UART数据传输时在不传输数据时保持在高电平,当开始传输数据时,先发出1bit位宽的低电平,表示数据开始传输,即为起始位。
2.1.2 数据位
数据位包含正在传输的实际数据,位宽可以为4bit到10bit,大多数情况下,数据首先从低有效位发送。
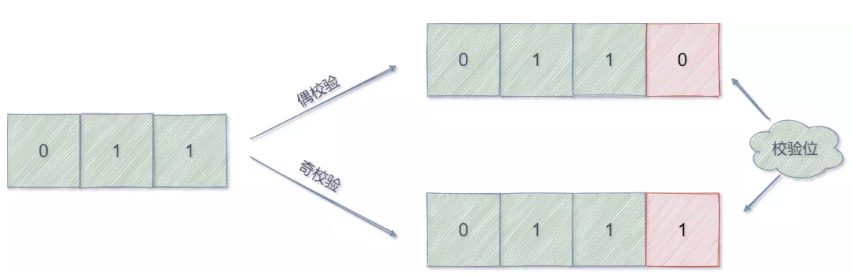
2.1.3 校验位
串口通信中的一种交错方式,通常有偶校验、奇校验、高校验和低校验四种检错方式,没有校验位也是可以的。
偶校验:数据位加上校验位后,“1”的位数应为偶数;
奇校验:数据位加上校验位后,“1”的位数应为奇数;
2.1.4 停止位
在数据发送结束后发送一位高电平用于停止标识。
由于数据是在传输线上定时的,并且每一个设备有其自己的时钟,很可能在通信中两台设备间出现了小小的不同步。因此停止位不仅仅是表示传输的结束,并且提供计算机校正时钟同步的机会。适用于停止位的位数越多,不同时钟同步的容错性越好,但是数据传输率同时也越慢。
3.1.5 波特率
串口数据的传输速度用波特率(bit/s)进行衡量,常见的波特率有:9600、19200、38400、57600、115200。假设UART配置为1bit起始位,8bit数据位,没有校验位,1bit停止位,那么9600bit/s的波特率可得出每一位数据的时间宽度为:T=1/9600*10=1.04ms,即每个字节(10bit数据)传输需要1.04ms。同理可得各个波特率下数据位传输时间宽度。
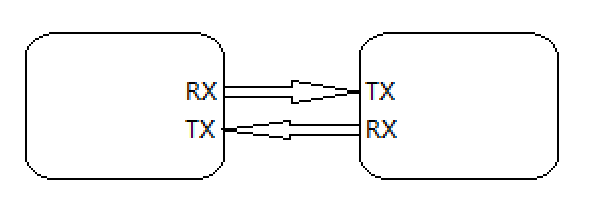
2.2 UART传输过程
1. 发送端数据总线将数据包并行传输给发送端UART;
2. 发送端UART将起始位、奇偶校验位和停止位添加到数据包中;
3. 接收端UART解析数据包数据;
4. 接收端UART将所解析的数据传输给接收端数据总线。
03UART代码实现
3.1 UART目标实现功能
设计一个UART发送模块和接收模块,具体要求如下:
1. 设计一个UART发送模块,该模块接收一个8位输入数据并采用UART协议发送,UART 采用10位传输协议,即一位起始位,8位数据位,一位终止位。发送数据时先发低位数据,最后发高位数据。要求波特率为1K。模块的定义如下:
module uart_tx (
clk_40k, //clock signal, 40kHz
rst_n, //reset signal, active low
din, //the input data which will be sent by the UART module, 8 bit width
send_start,//the start enable signal, active high, the width is one clock period
bit_out //the serial output data
);
2. 设计一个UART接收模块,模块的定义如下:
module uart_rx (
clk_40k, //clock signal, 40kHz
rst_n, //reset signal, active low
bit_in, //the input serial bit,
dout_vld,//the output valid signal, active high,the dout is valid when this signal is high.
dout //received data, 8 bit width
);
3. 设计一个testbench,对发送模块和接收模块进行测试,测试过程如下,testbench产生一个随机数,然后启动uart_tx模块发送至uart_rx模块,当uart_rx模块接收到有效数据后,自动判断接收的数据是否正确。
3.2 Verilog代码
1. 发送模块 (uart_tx):
module uart_tx (
clk_40k,//clock signal, 40kHz
rst_n, //reset signal, active low
din,//the input data which will be sent by the UART module, 8 bit width
send_start,//the start enable signal, active high, the width is one clock period
bit_out//the serial output data
);
input [7:0] din;
input clk_40k;
input rst_n;
input send_start;
output bit_out;
reg flag;
reg tx_flag;
reg [6:0] cnt;
reg [5:0] tx_cnt;
reg [9:0] din_temp;
//flag: 发送过程flag始终拉高
always @ (posedge clk_40k)
begin
if(~rst_n)
flag <= 1'b0;
else if(send_start == 1'b1)
flag <= 1'b1;
else if(tx_flag == 1'b1)
flag <= 1'b0;
end
//tx_flag: 发送结束tx_flag拉高
always @ (posedge clk_40k)
begin
if(~rst_n)
tx_flag <= 1'b0;
else if(flag == 1'b1 && din_temp[0] == 1'b0)
tx_flag <= 1'b1;
else if(tx_cnt == 7'd10)
tx_flag <= 1'b0;
end
//cnt: 发送数据计数,clk_40k分频至1k波特率对传输数据进行计数
always @ (posedge clk_40k)
begin
if(~rst_n)
cnt <= 7'b0;
else if(tx_flag == 1'b1 && cnt != 7'd39)
cnt <= cnt + 1'b1;
else
cnt <= 7'b0;
end
always @ (posedge clk_40k)
begin
if(~rst_n)
tx_cnt <= 6'b0;
else if(tx_flag == 1'b1 && cnt == 7'd39)
tx_cnt <= tx_cnt + 1'b1;
else if(tx_flag == 1'b0)
tx_cnt <= 6'b0;
end
//din_temp: 8bit数据移位操作,串行输出
always @ (posedge clk_40k)
begin
if(~rst_n)
din_temp <= 10'b1111111111;
else if(flag == 1'b1 || send_start == 1'b1)
din_temp <= {1'b1,din,1'b0};
else if(tx_flag == 1'b1 && cnt == 7'd39)
din_temp <= {1'b1,din_temp[9:1]};
end
assign bit_out = din_temp[0];
endmodule
2. 接收模块 (uart_rx):
module uart_rx (
clk_40k, //clock signal, 40kHz
rst_n, //reset signal, active low
bit_in, //the input serial bit,
dout_vld,//the output valid signal, active high,the dout is valid when this signal is high.
dout //received data, 8 bit width
);
input bit_in;
input clk_40k;
input rst_n;
output reg dout_vld;
output reg [7:0] dout;
reg rx_flag;
reg [6:0] cnt;
reg [5:0] rx_cnt;
reg [7:0] dout_temp;
//rx_flag: 接收过程rx_flag始终拉高
always @ (posedge clk_40k)
begin
if(~rst_n)
rx_flag <= 1'b0;
else if(bit_in == 1'b0)
rx_flag <= 1'b1;
else if(rx_cnt == 6'd9)
rx_flag <= 1'b0;
end
//cnt: 接收数据计数,clk_40k分频至1k波特率对接收数据进行计数
always @ (posedge clk_40k)
begin
if(~rst_n)
cnt <= 7'b0;
else if(rx_flag == 1'b1 && cnt != 7'd39)
cnt <= cnt + 1'b1;
else if(rx_flag == 1'b0 || cnt == 7'd39)
cnt <= 7'b0;
end
always @ (posedge clk_40k)
begin
if(~rst_n)
rx_cnt <= 6'b0;
else if(rx_flag == 1'b1 && cnt == 7'd39)
rx_cnt <= rx_cnt + 1'b1;
else if(rx_flag == 1'b0)
rx_cnt <= 6'b0;
end
//dout_temp: 将串行接收数据转换还原为8bit数据
always @ (posedge clk_40k)
begin
if(~rst_n)
dout_temp <= 8'b0;
else if(rx_flag == 1'b1 && cnt == 7'd39)
begin
dout_temp[7] <= bit_in;
dout_temp[6:0] <= dout_temp[7:1];
end
end
//dout_vld: 传输完成标识,8bit数据传输结束拉高
always @ (posedge clk_40k)
begin
if(~rst_n)
dout_vld <= 1'b0;
else if(rx_cnt == 6'd9 && cnt == 7'b0)
begin
dout <= dout_temp;
dout_vld <= 1'b1;
end
else
dout_vld <= 1'b0;
end
endmodule
3. Testbench(tb):
`timescale 1us/1us
module tb();
reg clk_40k;
reg rst_n;
reg [7:0] din;
reg send_start;
wire bit_out;
wire bit_in;
wire dout_vld;
wire [7:0] dout;
assign bit_in = bit_out;
uart_tx i_uart_tx(
.clk_40k (clk_40k ),
.rst_n (rst_n ),
.din (din ),
.send_start (send_start),
.bit_out (bit_out )
);
uart_rx i_uart_rx(
.clk_40k (clk_40k ),
.rst_n (rst_n ),
.bit_in (bit_in ),
.dout_vld (dout_vld ),
.dout (dout )
);
initial
begin
rst_n = 1'b0;
#10
rst_n = 1'b1;
end
initial
begin
clk_40k = 1'b0;
forever
#1
clk_40k = ~clk_40k;
end
initial
begin
send_start = 1'b0;
din = 8'd0;
forever
begin
#1000
din = $random()%256;
send_start = 1'b1;
#2
send_start = 1'b0;
end
end
endmodule
4. 仿真结果 :
按照testbench对UART收发端进行仿真,仿真结果如图:
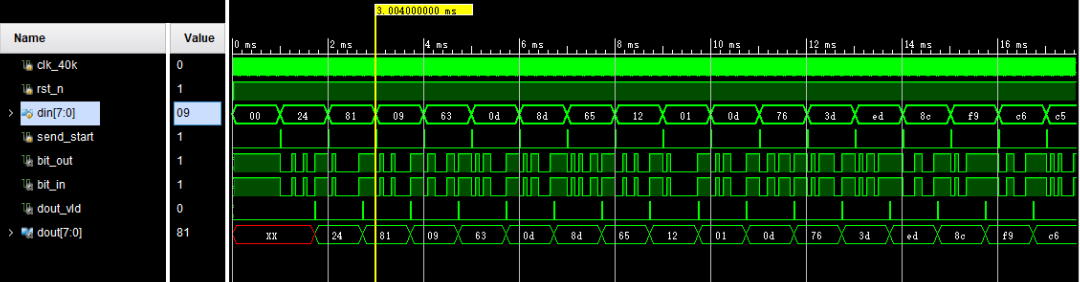
1. 系统时钟和传输速率通常不一致,clk_40k为高频系统时钟,利用计数器分频实现1k波特率;
2. 复位信号rst_n低电平有效,正常传输时始终处于高电平。
3. 开始传输时send_start信号拉高,传输结束时dout_vld信号拉高;
4. 输入数据din在传输结束后在输出数据dout体现出来,传输时延为1个数据长度。
04UART的优缺点
4.1 UART协议优点
1. 通信只需要两条数据线;
2. 无需时钟信号;
3. 有奇偶校验位,方便通信的差错检查;
4. 只需要接收端和发送端设置好数据包结构,即可稳定通信。
4.2 UART协议缺点
1. 数据帧最大支持9位数据;
2. 不支持多主机或多从机的主从系统。
审核编辑:汤梓红
-
UART通信协议介绍和数据传输工作流程2024-10-24 3632
-
【世说知识】一文搞懂UART通信协议2023-02-02 3652
-
解析常用串行总线——UART协议(上)2023-01-21 3025
-
常用串行总线(二)——SPI协议(Verilog实现)2023-01-06 11226
-
串行通信中的IIC总线工作原理是什么2021-12-08 1314
-
常用的串行总线协议有哪些2021-11-03 2246
-
基于SPI串行总线接口的Verilog实现2021-05-29 6405
-
基于Verilog的UART串行通信接口电路设计2019-09-03 3327
-
UART传输协议与时序2017-11-20 16287
-
SPI、I2C、UART串行总线协议2015-11-30 1195
-
SPI、I2C、UART三种串行总线协议的区别2011-11-02 17511
-
基于Verilog的SMBus总线控制器的设计与实现2010-07-16 506
全部0条评论

快来发表一下你的评论吧 !
