

如何在PLL输出端产生最低的相位噪声?
描述
锁相环 (PLL) 在当今的高科技世界中无处不在。几乎所有商业和军用产品都在其运行中使用它们,相位(或 PM)噪声是一个主要问题。频率(或 FM)噪声密切相关(瞬时频率是相位的时间导数)并且通常在相位噪声的保护伞下考虑(也许两者都可以被认为是“角度噪声”)。幅度(或 AM)噪声是另一个考虑因素。
虽然两者都会影响 PLL 性能,但振幅噪声通常是自限性的,不会产生任何影响。因此,PLL 输出和 RF 组件的相位噪声是主要问题。当然,输出相位噪声是最重要的问题——它主要取决于每个组件的相位噪声。
许多因素都会导致元件相位噪声,例如电源、EMI 和半导体异常等等。了解这些因素使我们能够实施组件相位噪声的缓解策略,并最终实施输出相位噪声。
我们讨论的 PLL 属于模拟硬件类型,而不是数字或软件类型。这种 PLL 的一般拓扑结构是一个单环路系统,其中包含精密参考、参考分频器、反馈分频器、可能的预分频器、电压或电流(也称为电荷泵)鉴相器、环路滤波器和压控振荡器 (VCO) . 这些组件可能都是分立的,或者其中一些可能包含在 IC 中。无论如何,我们展示了如何分析一般的相位噪声,以及 RF 分量相位噪声如何通过 PLL 传播以确定其输出相位噪声。
在第 1 部分中,我们讨论了相位噪声的一些简要理论和典型测量及其分析(建模、仿真和传播),并详细展示了大多数计算机辅助设计 (CAD) 应用程序使用的方法。
相位噪声的简要理论和典型测量
相位噪声是一个重要而复杂的课题,研究正在进行中,对其起源的理解也很脆弱,数学基础也有问题。然而,许多近似值和变通方法被用来产生极好的理论和实践结果。1,2,3这是一个成熟的学科,有很多可用的文献。有几种仪器可以精确测量相位噪声,并且无数带有 PLL 的现场系统都具有受控的相位噪声特性。
在这里,我们简要回顾时域和频域中的相位噪声理论,以及基带 (BB) 领域(对 RF 载波信号进行相位调制的 BB 噪声信号)和 RF 领域(RF由 BB 噪声信号进行相位调制的载波信号)。
此外,我们还总结了频域中两个领域的典型相位噪声测量,当然,它们是同一现象的不同等效表示,并给出相同的结果。
BB 领域被认为是不太重要的领域,但对于相位噪声的起源很重要,并且提供比 RF 领域更好的测量精度。RF 领域被认为是更重要的领域,并且对相位噪声的可观察表现很感兴趣,尽管它的测量精度不如 BB 领域。1,8此外,我们调查了两种测量类型的等效性。
正如所有物理学中众所周知的那样,存在确定性和非确定性(也称为随机、随机或概率)过程。在 PLL 中,这些过程是信号,可以在时域和频域两个域中表示,两个域通过傅立叶变换通过变换理论相关联。
要使用(在本例中为连续)变换理论,系统被建模为(连续)线性时不变网络,这意味着 PLL 必须处于锁定状态。相反,处于解锁状态的 PLL 模型是非线性的;因此,不能应用变换理论。
此外,域之间的转换对于确定性信号是直接的,对于随机信号是间接的。直接意味着直接在时域和频域之间进行变换,因为存在直接变换。间接是指域之间的转换有一个中间步骤,就是计算随机信号的自相关函数,取其时间平均,然后进行变换,因为直接变换是不存在的。6个
然后,在 RF 系统或 RF 组件中,当已知和未知来源的内部和/或外部 BB 随机(噪声)信号对系统或组件的内部 RF 确定性(载波)进行相位调制时,会产生相位噪声) 信号。当然,相位噪声是一种随机现象或信号,因此充满了间接变换。
通常,对于频域中的随机信号,作为电压谱密度 (VSD) 的频谱是不存在的。然而,频谱确实以功率谱密度 (PSD) 的形式存在,只有幅度信息而没有相位信息。相比之下,对于频域中的确定性信号,频谱通常确实以 VSD 形式存在,具有幅度和相位信息,当然,扩展后也具有 PSD。
此外,在 BB 领域的频域中,频谱是低通(或准低通)函数,而对于 RF 领域,频谱是带通函数。此外,在本次讨论中,我们仅使用正单边 (OS) 频谱和正单边带 (SSB) 相位噪声信息,而不是双边 (TS) 频谱和双边带 (DSB) 相位-噪音信息。
我们还注意到,在时域中,相位噪声通常称为相位抖动,而在频域中,它通常称为规定相位噪声。这两个域中的现象通过瞬时频率定义为相位的时间导数而相关联。1,8,10
考虑到上述背景,我们简要回顾了时域和频域的一些理论以及BB 领域的 域之间的转换。在这个领域,我们的理论和分析原则上基本上存在,因为我们的随机(噪声)信号在时域(这是我们的分析开始的地方)没有解析表达式。因此,经过变换后,频域上没有解析表达式。我们有以下数学表示和变换步骤:6,7,8
1.时域函数或相位波形,它是一个真实的(非复杂的)随机过程,具有零均值高斯概率密度函数,ϕ(t):

其中t是时间。
2. (1)的自相关函数,R ϕ (t, τ):

其中τ是测量之间的正时间增量,E op {...}是统计平均运算符。
3. 等式 2 的时间平均值的傅立叶变换,给出非归一化 (UN) BB频域函数或 PSD,W ϕ ( ξ)或WdB ϕ( ξ):

其中ξ是频率,A op {...}是时间平均算子,F op {...}是傅里叶变换算子。典型的相位波形图及其 UN BB PSD如图 1a 和 1b所示。
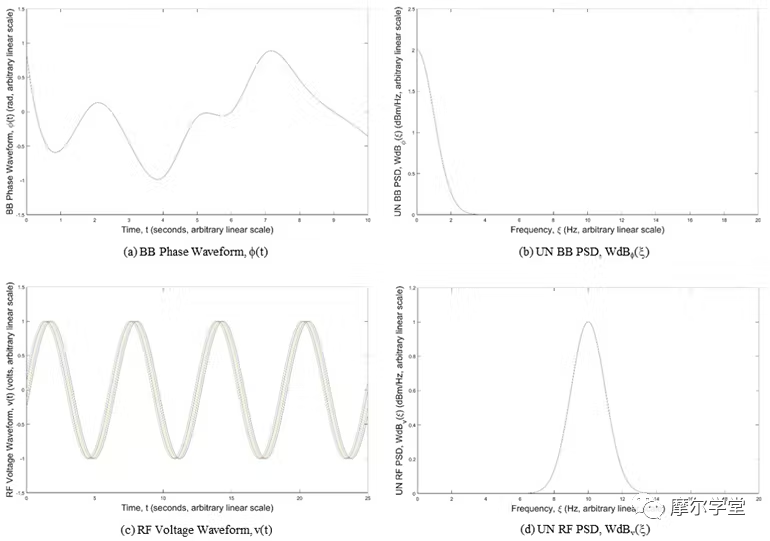
1. (a) 基带 (BB) 相位波形 ϕ(t),(b) 非归一化 (UN) BB 功率谱密度 (PSD),Wdb ϕ (ξ),(c) 的相位噪声理论中的典型图) RF 电压波形 v(t),以及 (d) UN RF PSD,Wdb v (ξ)。
接下来,我们简要回顾时域和频域中的类似理论以及射频领域的域间转换。在这个领域,我们的理论和分析是相当分析的,因为在时域中我们的确定性(载波)信号有一个相当分析的表达式(这又是我们分析的起点)。因此,经过变换后,在频域上有一个相当解析的表达式。
对于≤ 0.2 弧度(≤ 11.5°)的“合理”相位波形偏差(也称为小角度...、小调制指数...或窄带 PM...近似值),其中 PM 频谱与DSB AM 频谱——这是所有实际相位噪声问题的情况——我们有以下数学表示和变换步骤(为简洁起见未显示细节):7、8、10
4.时域函数或电压波形(也是BB参数的函数),v(t):

其中V是统计平均振幅,f 0是载波频率,Θ是初始相位(V是一般振幅的特例,V + a(t),其中a(t)是统计零均值a(t) = 0的振幅噪声,因为如前所述,它是自我限制的并且没有任何后果):
5. 等式 4 的自相关函数(同样也是 BB 参数的高斯概率密度函数),R v ( τ ):

其中R φ (0)是R φ ( τ) ,其中τ = 0,这是φ(t)的方差。
6. 等式 4 的时间平均值的傅立叶变换(同样也是 BB 参数的函数)给出 UN RF频域函数或 PSD,W v ( ξ)或WdB v ( ξ):

其中d ( ξ– f 0 )是 Dirac delta 或单位脉冲函数,W ϕ ( ξ– f 0 )是 UN BB PSD,W ϕ ( ξ),通过调制过程从 BB 领域转换到 RF 领域。典型的电压波形图及其 UN RF PSD如图 1c 和 1d所示。
需要注意的是,如果ϕ(t)是严格平稳的(一个合理的假设),则可以证明v(t)至少是广义平稳的。在这种情况下,Weiner-Khinchin 定理成立,R ϕ (t, τ )和R v (t, τ )仅成为 τ 的函数,[ R ϕ (t, τ ) → R ϕ ( τ )和R v (t, τ ) → R v ( τ )],因此不需要找到R ϕ ( τ )和R v ( τ )的时间平均值。因此,W ϕ ( ξ)和W v ( ξ)是R ϕ ( τ )和R v ( τ )本身的傅里叶变换。1,6,7,9
然后,根据上述简要理论,我们总结了频域中 BB 和 RF 领域相位噪声的典型测量。
BB 领域的测量
在上面的 UN BB PSD 中,选择了一个特定的频率,并将其在 1 Hz 带宽中的功率除以低通频谱上的总积分功率,得到归一化 (NM) BB PSD,L ϕ ( ξ )或LdB ϕ ( ξ):

其中ξ是特定频率,P z是总积分低通功率,dBz 是相对于P z的分贝数。测量是间接的,使用信号源分析仪,解调、测量、处理和显示 BB 信号以产生L ϕ ( ξ)或LdB ϕ ( ξ) [ W ϕ ( ξ)包含 DSB 信息,因此因子L ϕ ( ξ)的计算需要 2给 SSB 信息]。它被认为比在 RF 领域所做的更准确。1,8
射频领域的测量
在上面的 UN RF PSD 中,选择了一个特定的载波偏移频率。它在 1 Hz 带宽内的功率除以带通频谱上的总积分功率,得到 NM RF PSD、L v (f)或LdB v (f):

其中f是载波的特定偏移频率 ( f = ξ − f 0其中ξ≥ f 0 ), P c是总积分带通功率,dBc 是相对于P c的分贝数。测量是直接的,使用具有相位噪声处理能力的频谱分析仪测量、处理和显示射频信号以产生L v (f)或LdB v (f)。它被认为不如在 BB 领域中所做的那样准确。1,8
两种测量的等效性
如前所述,L ϕ ( ξ)或LdB ϕ ( ξ)和L v (f)或LdB v (f)是同一现象的不同表示,逻辑上应该对所有实际相位噪声问题给出相同的结果(其中,也如前所述,相位偏差被认为是“合理的”)。因此,对于这种情况,它们是等价的并且给出相同的结果,称为 NM PSD、L(f)或LdB(f)。BB 和 RF 领域下标 ( ϕ和v) 被删除并且不使用下标(即使是“合理”条件也有一些异常,必须使用具有学术和实践论据的近似值):1,10

其中,典型显示的f是 x 轴载波的偏移频率,单位为 Hz,对数标度,LdB(f)是 y 轴的 NM RF PSD,单位为 dBc/Hz,线性标度规模,对于上述间接和直接测量,最终将一切与 RF 领域相关联(图 2)。

2. 频域中基带和射频领域相位噪声的典型测量。
需要注意的是,如果不满足“合理”条件,则必须使用贝塞尔函数数学将L ϕ ( ξ)与L v (f)联系起来。因此,这两种测量不会等同,会给出不同的结果,并且会被认为是灾难性的问题。
相位噪声的分析(建模、仿真和传播)
3. 用于相位噪声分析(建模、仿真和传播)的一般相位噪声模型。
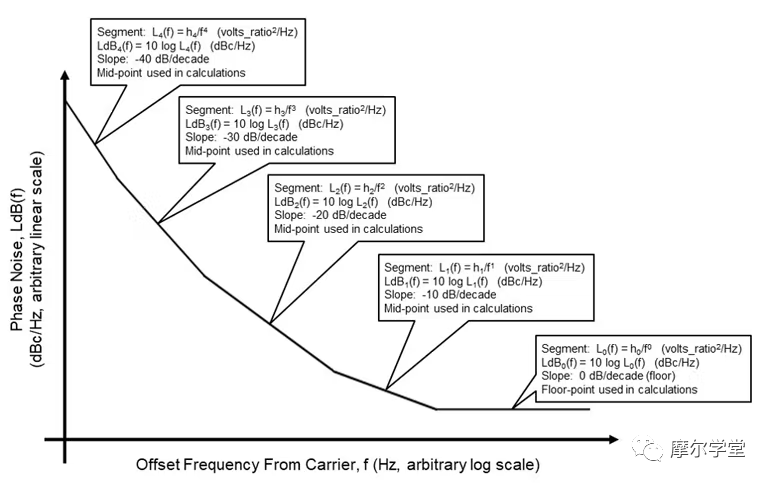
有了以上信息,我们现在开始分析 PLL 中的相位噪声,以及一般如何对其进行建模和仿真。还讨论了 RF 分量相位噪声如何通过 PLL 传播以确定其输出相位噪声。通常,相位噪声可以使用“通用相位噪声模型” (图 3)及其标准整数幂级数进行有效建模:

其中h是加权系数,f是载波的偏移频率。1,7然后使用任何标准应用程序对其进行仿真(在本例中,我们使用 MATLAB)。最后,组件相位噪声通过 PLL 的传播以确定其输出相位噪声是使用通用 PLL 模块“图表和相位噪声传播模型”完成的(图 4)。
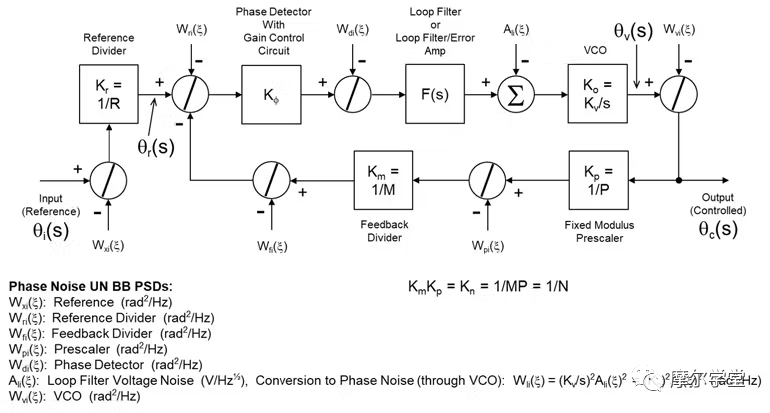
4. 用于相位噪声分析(建模、仿真和传播)的通用 PLL 框图和相位噪声传播模型。
此外,为了简化分析,所有组件的相位噪声都近似为不相关(合理的假设),以便它们的 NM PSD 直接相加,而不必处理相关信号,这会使分析变得非常复杂。然后使用以下相位噪声分析程序进行分析:4,5
1. PLL 必须表示为(在本例中为连续的)线性时不变网络,这意味着它必须锁定在其输出之一。
2. 所有组件的相位噪声必须近似为不相关。
3. 每个组件的相位噪声图都是从其数据表中获得的,“通用相位噪声模型” (图 3)适合每个组件的图,以确定匹配的通用模型的部分(其中一些可能不存在)每个组件的情节。
4. 对于每个组件的拟合通用相位噪声模型,一个相位噪声点,LdB j (f k ) ( j,k = 0,a; 1 ,b ; 2,c ; 3,d ; 4,e ),在每个获得段用于计算(通常使用段内的中点)。将所有对数值转换为线性值,LdB j (f k ) Þ L j (f k ):

5. 每个组件的拟合通用相位噪声模型系数h j是使用来自步骤 4 的相位噪声点(其中一些可能为零)计算的:

6. 来自步骤 5 的每个组件的拟合通用相位噪声模型系数h j用于形成每个组件的相位噪声模型L ci (f):

可以对其进行模拟以产生分量相位噪声曲线。
7. 来自步骤 6 的每个组件的相位噪声模型L ci (f)乘以其适用的传递函数(输出或误差;稍后讨论)幅度平方,| T(f) | 2,得到其传播的相位噪声模型,L co (f):

可以对其进行模拟以产生组件传播的相位噪声曲线。
8. 来自步骤 7 的每个组件的传播相位噪声模型L co (f)与所有其他相加在一起以获得输出相位噪声模型L至(f):

可以对其进行仿真以产生输出相位噪声曲线。
这就是我们的相位噪声分析(建模、仿真和传播)过程。如前所述,这是大多数 CAD 应用程序用于相位噪声分析的方法。
审核编辑:刘清
-
锁相环PLL的噪声分析与优化 锁相环PLL与相位噪声的关系2024-11-06 5058
-
相位噪声对射频链路产生了哪些影响?2024-01-31 2562
-
如何评估分布式PLL系统的相位噪声?2023-11-06 1787
-
如何通过读取PLL的相位噪声规格对无线电的性能进行初步评估?2023-10-31 1383
-
整数N分频和小数N分频PLL频率合成器的相位噪声2023-01-09 7213
-
根据基本的数据表规格估算出PLL相位噪声的教程2022-11-17 490
-
如何根据基本的数据表规格估算出PLL的相位噪声2021-11-24 3957
-
如何在锁相环中实现相位噪声和杂散性能2019-05-21 6963
-
两款具有优秀相位噪声性能组成的PLL合成器介绍2019-04-16 5085
-
导致PLL相位噪声和参考杂散的原因及解决方案2019-04-04 25828
-
pll相位噪声怎么计算2011-12-07 12123
-
怎样将相位噪声和抖动降至最低及其估算方法2009-10-13 3678
-
锁相环(PLL)和相移键控(PSK)系统的相位噪声2008-11-24 2404
全部0条评论

快来发表一下你的评论吧 !
