

图腾柱TCM控制方式的特性
描述
基于上述图腾柱TCM的工作过程分析,可以总结出TCM控制的图腾柱拓扑所具有的几点优势:
(1) 较低的器件导通损耗:
A、 全部开关器件都是采用MOSFET或GAN,没有快速、慢速的二极管器件,仅在死区时间内有MOSFET体二极管短时续流。
B、 在每个工作时段(电感充能、放能回路)的电流回路都只流过两个开关器件。
(2) 较低的器件开关损耗:
A、 所有的高频MOSFET或GAN都工作在ZVS状态。
B、 在每个工作周期内没有二极管反向恢复损耗。
(3) 可以得到较高的功率密度:
A、 较低的开关损耗可以使得此拓扑工作在较高的开关频率。
B、 多个TCM单元交错并联可以通过电感集成进一步提高功率密度。
图腾柱的TCM控制的工作方式是变频的,其实现方法与我们过去的定频控制的PFC都不同。并且,由于无法精确确定下一个开关周期,其实现方法与我们的LLC的变频控制也不相同。因此,目前的TCM控制策略,是基于触发信号的变频控制方法。
下图12是TCM控制在单个开关周期的工作波形图。其中,t2和t5时刻是驱动信号的变更时刻,此时刻的获得方法,目前是通过外部硬件触发信号来获得。
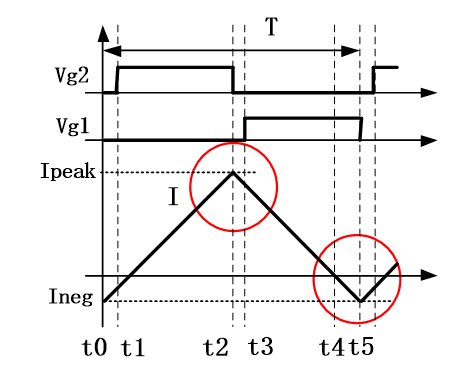
图 12单个TCM工作周期的关键控制时刻
对于t2的控制时刻的获得,可以有两种方法:(1)通过计算主功率管的开通时间Ton获得;(2)通过硬件比较电路获得,即峰值电流控制。
但是采用峰值电流控制有以下几个缺点:
1)采用峰值电流控制时,由于需要对大范围的PFC电感电流做瞬时采样,故采样精度无法保证,这就导致峰值电流控制效果不佳。
2)由于峰值电流需要采样实时信号,故电流采样滤波器带宽需要做的很高,否则电流可能不受控,但这也导致电感电流采样极易受干扰。
而采用计算Ton的控制方式,可以有效避免上述问题。我们选用的是第一种方法。
对于t5的控制时刻的获得,通常是采样到电流过零时刻t4,然后经过一定的延时时间Tr,达到t5,延时时间Tr可通过计算获得。可以有两种方法获得t4时刻的过零信号:(1)分流器采集过零信号;(2)饱和CT采集过零信号。预研时,我们选用的第二种方法,由于饱和CT无法采样电感电流实时值,从而无法做CCM控制,故我们选用的是第一种方法。
-
基于小华HC32F334数字电源控制器的两路交错无桥图腾柱CCM模式参考设计2025-08-16 6576
-
两路交错无桥图腾柱TCM_PFC 参考设计2025-06-24 650
-
基于小华HC32F334的两路交错无桥图腾柱TCM PFC参考设计2025-03-26 6897
-
为什么取名图腾柱?推挽电路和图腾柱电路的区别2024-01-30 16137
-
图腾柱和互补推挽有什么区别?为什么PWM驱动芯片用图腾柱?2023-12-07 6537
-
交错TCM图腾柱无桥PFC仿真2023-06-23 8001
-
为什么叫图腾柱?图腾柱驱动的作用与原理2023-06-08 19424
-
图腾柱TCM的工作过程分析2023-03-22 3861
-
图腾柱PFC介绍2022-11-17 1655
-
互补推挽驱动、图腾柱驱动2022-04-19 14416
-
图腾柱输出和互补推挽输出异同点2022-03-22 15369
-
图腾柱驱动电路电压问题2021-10-17 4588
-
请问图腾柱电路原理如何分析?2019-01-11 9953
-
一文看懂图腾柱电路工作原理2018-03-07 162941
全部0条评论

快来发表一下你的评论吧 !
