
资料下载


通过USB使用ESC和FPGA控制BLDC电机的速度
362163
分享资料个
描述
DShot 协议
在 DShot 之前,飞控更新速度比标准 PWM 速率更快,这会导致性能和调整问题。开发了更快的模拟 PWM,即 OneShot125 和其他几个。对于基于 PWM 的协议,接收器必须测量脉冲以确定速度,很少有发射器和接收器具有相似的时钟精度,因此可能存在一些差异,因此飞行控制器软件包括一个校准步骤来找到最大值和最小值。
DShot 是数字的,速度与遥测请求和校验和一起被编码为“数据包”,因此无需校准。DSHOT 支持多种速度 150、130、600 和 12000。因此,数字越大,数据包比特率越快,因此数据包发送到 ESC(电子速度控制器)的速度越快
这是一个基本的 DSHOT 数据包:
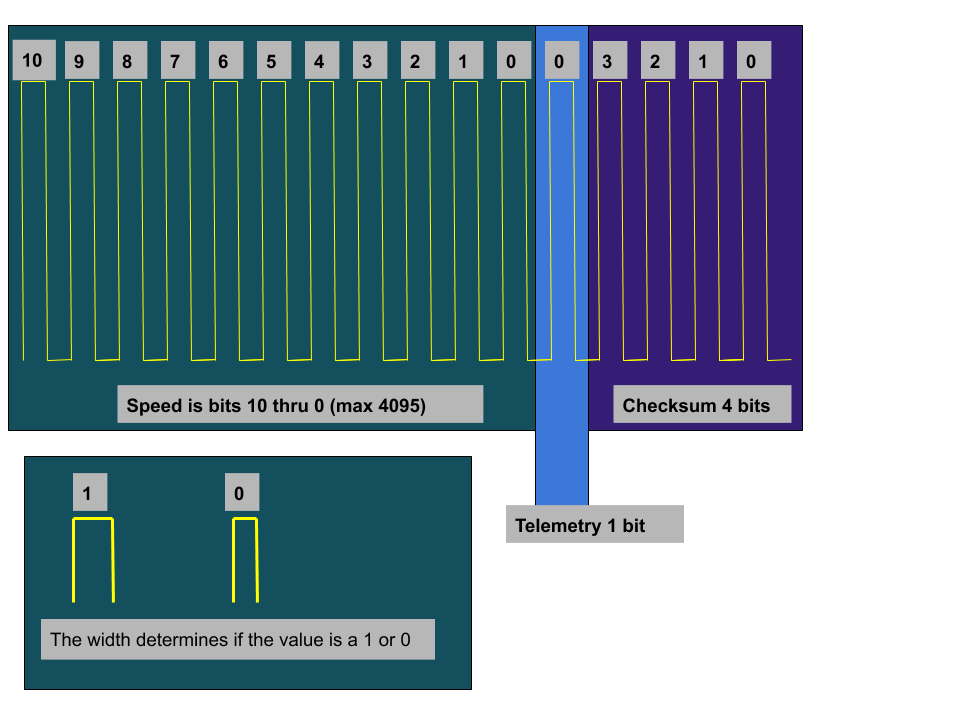
数据包流从左到右发送,因此首先发送速度位 10,然后发送速度位 9,依此类推。那么,逻辑 1 和逻辑 0 是如何编码的?宽度决定值是 1 还是 0,宽度越长,值为 1。对于 DSHOT150,下表是:
DSHOT 150 单个比特周期:6.67us 高电平时间(1):5.000us 高电平时间(0):2.500us
DSHOT 300 单个比特周期:3.33us 高电平时间(1):2.500us 高电平时间(0):1.250us
DSHOT 600 单个比特周期:1.67us 高电平时间(1):1.250us 高电平时间(0):0.620us
DSHOT1200 单个比特周期:0.83us 高电平时间(1):0.025us 高电平时间(0):0.313us
PC 应用程序将格式化 16 位,代码位于 HTML nwjs 应用程序中。
使用 FPGA 的 DSHOT 150
对于本项目,不支持接收遥测信息,仅以 150 速率传输 DSHOT 16 位值。FPGA 的职责是以编程的时钟速率将 16 位值发送到 ESC,该值将由 PC 软件编码,这简化了 FPGA 逻辑。
该项目利用了使用 FPGA 项目解码 PWM。
DSHOT150 在 ip/DSHOT/dshot_out.v 中实现:
`default_nettype none
`timescale 1 ns / 1 ns
module dhot_output #(
parameter update_guardtime = 1000000, //1 second
parameter clockFrequency = 50000000
) (
input wire i_clk, // clock.clk
input wire i_reset, // reset.reset
input wire [15:0] i_dshot_value,
input wire i_write, // .write
output wire o_pwm
);
/* state machine state of single bit */
localparam [3:0] INIT_TIME = 4'h0,
HIGH_TIME = 4'h1,
LOW_TIME = 4'h2,
IDLE_ = 4'h3;
/* DSHOT Bit time: (1 - TH1) (0-T0H)
DSHOT 150 Bit time is 6.67us 5.00us 2.50us
DSHOT 300 Bit time is 3.33us 2.50us 1.25us
DSHOT 600 Bit time is 1.67us 1.25us 0.625us
DSHOT1200 Bit time is 0.83us 0.025 0.313us
*/
/* For DSHOT150 clk is 50Mhz so 0-T0H is 2.50 * 50 = 125
0-Off is (6.67 - 2.50us) * 50 = 208.9
*/
localparam [15:0] LOW_HIGH_TIME = 125;
localparam [15:0] LOW_LOW_TIME = 209;
/* For DSHOT150 clk is 50Mhz so 0-T1H is 5.00 * 50 = 250
0-Off is (6.67 - 5.00us) * 50 = 83.5
*/
localparam [15:0] HIGH_HIGH_TIME = 250;
localparam [15:0] HIGH_LOW_TIME = 84;
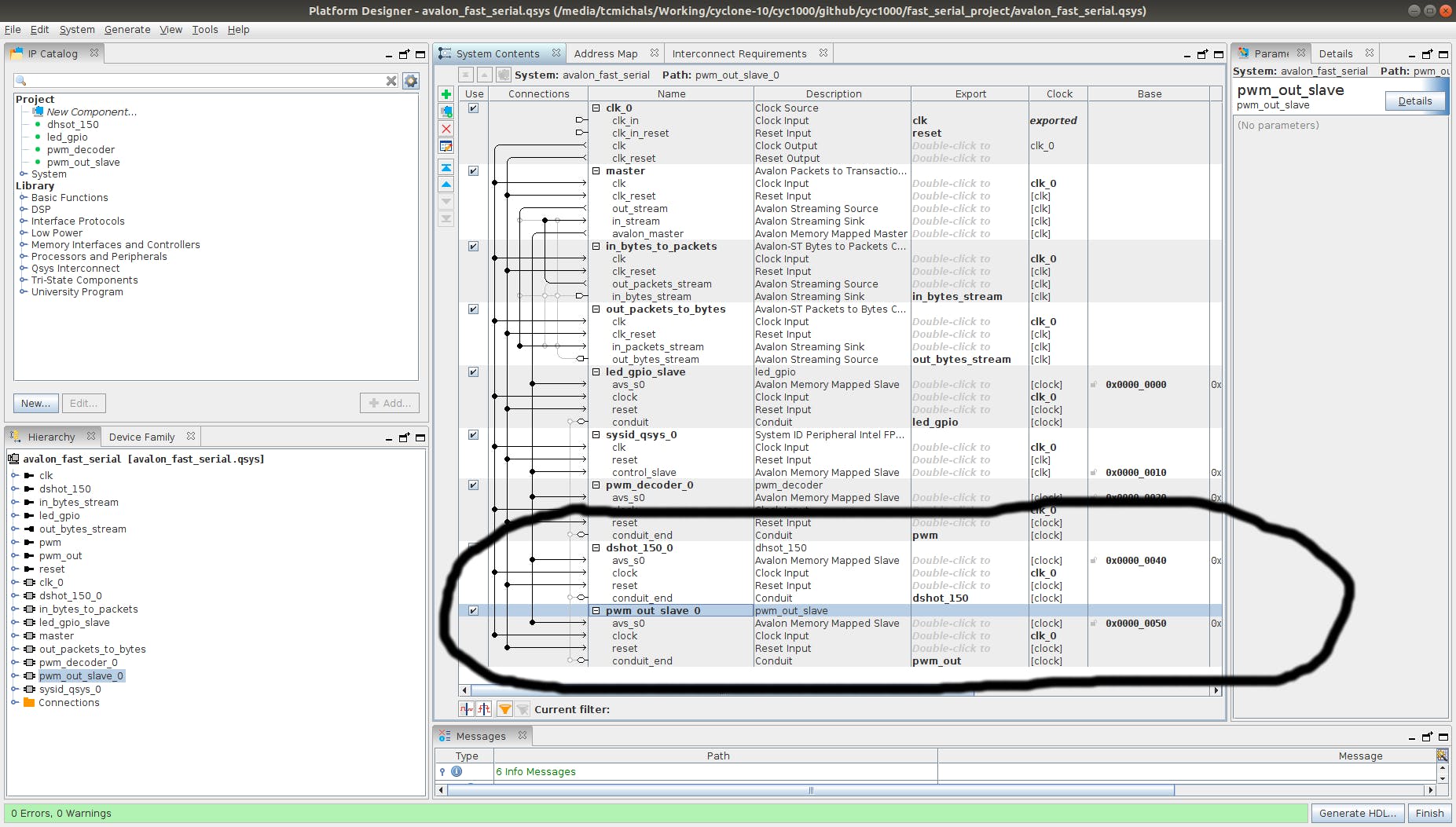
Avalon 从接口
要访问 DSHOT 150,需要创建 Avalon 从站,就像之前创建从站内存映射接口一样,然后拖放到系统内容并重新映射内存地址。我已经包括了一个额外的 ESC 电机控制器 PWM。两者如下图所示:
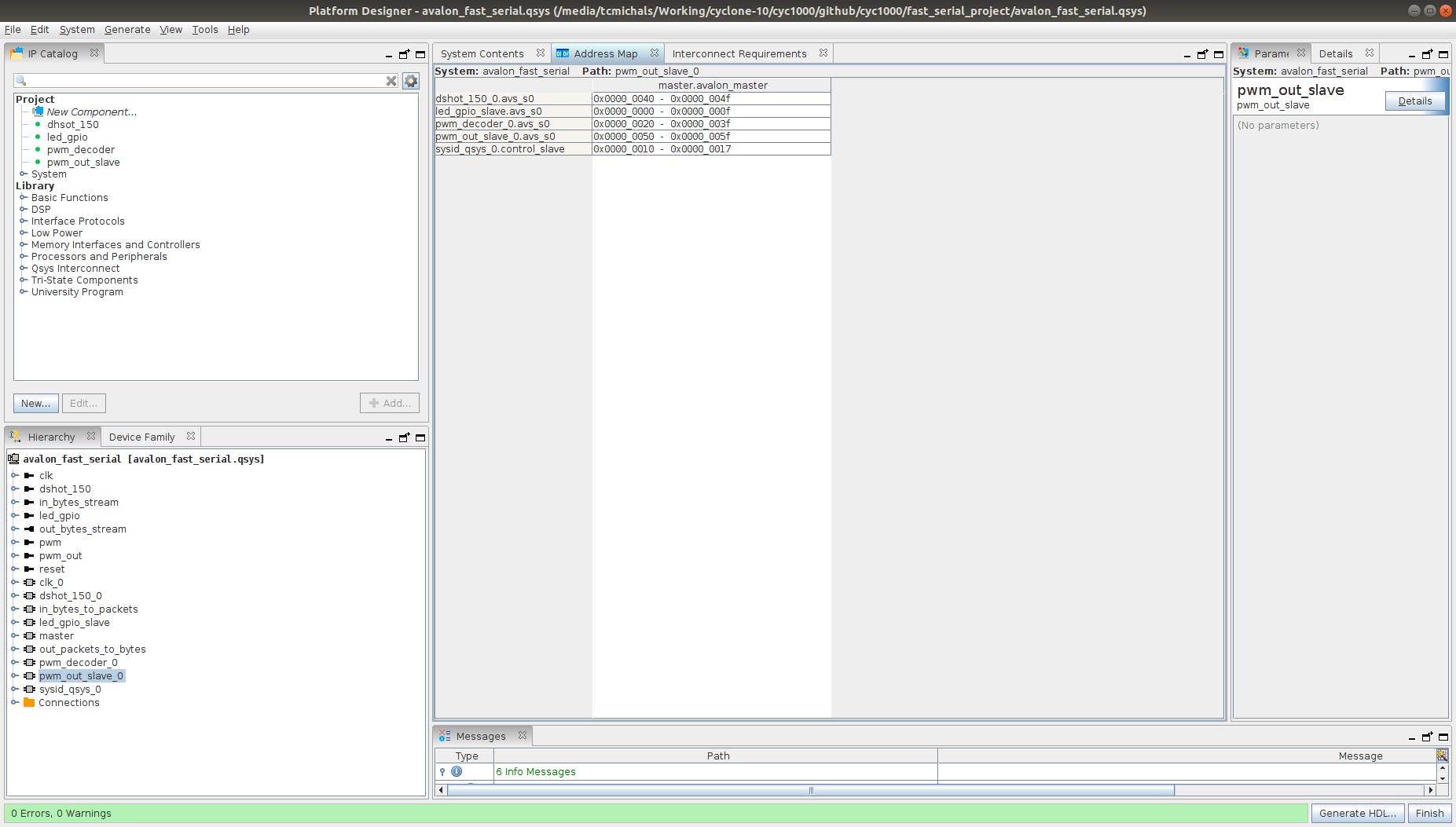
这是新的内存映射:
顶层
更新了 fast_serial.v 以将电机的输出映射到 FPGA 的引脚 D2、D3、D4 和 D5。目前,Avalon 总线不支持将输出重新映射为 PWM 或 DSHOT。以下代码经过多路复用器硬编码,可根据本地参数 MOTOR_CONTROL 将 DSHOT 或 PWM 映射为输出。
assign D5 = (MOTOR_CONTROL)?dshot_out_1:pwm_out_1;
assign D4 = (MOTOR_CONTROL)?dshot_out_2:pwm_out_2;
assign D3 = (MOTOR_CONTROL)?dshot_out_3:pwm_out_3;
assign D2 = (MOTOR_CONTROL)?dshot_out_4:pwm_out_4;
要启用 DSHOT150 或 OnseShot 125,需要创建一个 Avalon 内存映射地址来选择 ether DSHOT 或 PWM,然后驱动多路复用器。也可以使用相同的方法支持串行和遥测,但使用 inout。
这是新的 nwjs 应用程序的屏幕截图,电机可以由通道 0 驱动,也可以通过电机滑块驱动。建议拆下螺旋桨,将电机牢固地用螺栓固定在厚板上。
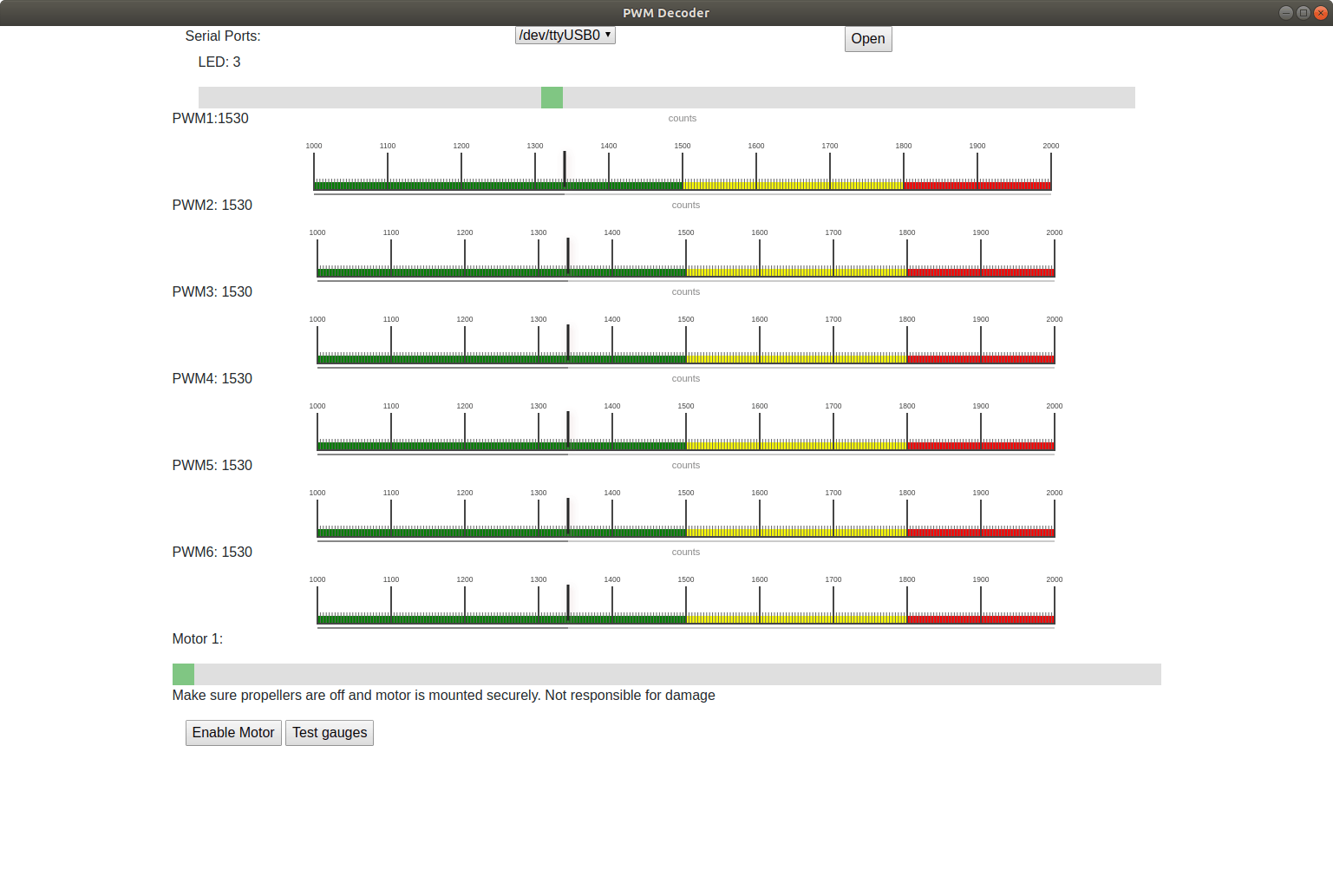
Enable Motor 按钮打开 DSHOT 生成,因此,ESC 会发出几声哔哔声,通知用户电机已“武装”。增加滑块将增加速度。此外,LED 滑块还允许更新 LED。打开发射器,所有控件都处于活动状态。
串行端口接口从 FTDI 芯片接收数据很慢,因为驱动程序在传输时有缓冲,在 Linux 上降低它:
setserial /dev/ low_latency
另一种方法是libftdi,有一个API来设置latency_timer,ftdi_set_latency_timer,我做了一个简单的修改,允许值为0。由于从FPGA到FTDI的传输数据是25Mhz,所以Avalon数据包作为一个USB到达数据包,但以微帧速率。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章







