
资料下载


使用Arduino来控制直流电机
分享资料个
描述
L298N模块有一个非常有名的L298电机驱动IC,它是这个模块的主要部分。本模块采用PWM方式控制直流电机的转速。
L298N电机驱动器规格
该模块将允许您控制两个直流电机的速度和方向。它可以控制在 5 至 35V 和高达 2A 之间运行的电机。该模块有一个板载稳压器,有助于提供 5V 的输出。该模块可以从 Arduino 或外部电源从 5 到 35V 供电。建议始终使用外部电源。它还可以控制步进电机。它价格低廉,非常适合机器人项目。
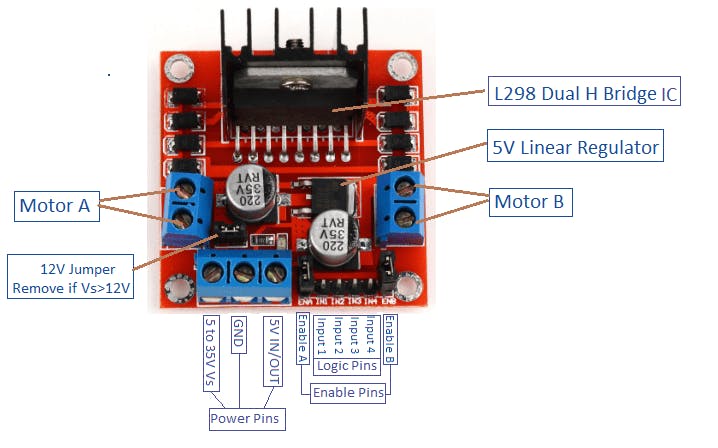
L298N 电机驱动器的引脚输出
电机 A:此接线端子将为第一个电机提供输出。
12V 跳线:如果您的电源电压低于 12V,请保留此跳线,并且 5V 电源引脚将为您提供 5V 的输出。如果电源电压大于 12V,则去掉这个跳线,给 5V 电源引脚提供 5V 电源,这样 L298 双 H 桥 IC 才能正常工作。
电源引脚:在 12V 引脚和接地端提供 5 至 35V 的电源电压。如果您的电源电压大于 12,请确保移除 12V 跳线。如果 Vs 小于 12V,5V 引脚将用作输出,如果 Vs 大于 12V,5V 引脚将用作输入。
启用引脚:如果您想控制直流电机的速度并将它们连接到 Arduino 的 PWM 引脚,请移除启用 A 和启用 B 上的跳线。如果要使用 L298N 控制步进电机,则将跳线保持在 Enable A 和 Enable B 上。将跳线保持在这些引脚上意味着这些引脚将为高电平。
逻辑引脚:将逻辑引脚连接到 Arduino 的任何数字引脚。这些将有助于控制直流电机的旋转和速度。
电机 B:此接线端子将为第二个电机提供输出。
5V 线性稳压器:这会将电源电压降至 5V,并在 5V 引脚上提供输出。
本教程所需的组件
本教程所需的组件如下
- 阿杜诺
- L298N 电机驱动模块
- 2 X 直流电机
- 操纵杆模块
- 12V电池
使用 L298N 电机驱动器控制直流电机
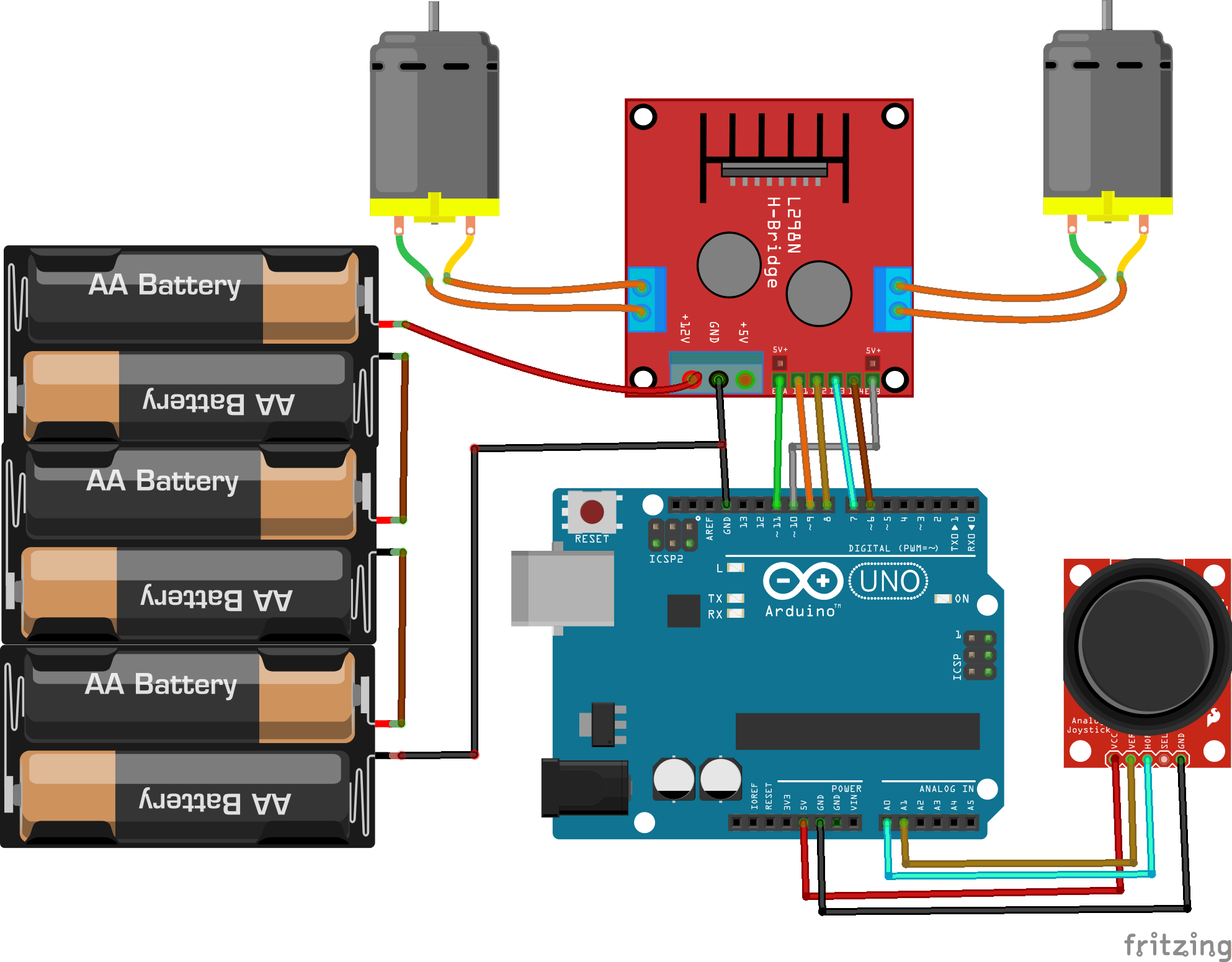
L298N电机驱动模块与Arduino的连接电路图如下所示。进行如下连接
L298N
阿杜诺
5至12V电池/电源
ENA Pin 11 IN1 Pin 9 IN2 Pin 8 IN3 Pin 7 IN4 Pin 6 ENB Pin 10 12V 5转12V电源或电池 GND GND 电源或电池负极 最后,连接L298N两侧的两个直流电机
为了给 L298N 供电,我使用了 2 节 3.7V 的可充电电池。
然后将操纵杆模块与 Arduino 连接如下
操纵杆模块
阿杜诺
VCC 5V VER A1 HOR A0 GND GND
代码
//Joystick Pins
int x_key = A0;
int y_key = A1;
int x_pos;
int y_pos;
//Motor Pins
int EN_A = 11; //Enable pin for first motor
int IN1 = 9; //control pin for first motor
int IN2 = 8; //control pin for first motor
int IN3 = 7; //control pin for second motor
int IN4 = 6; //control pin for second motor
int EN_B = 10; //Enable pin for second motor
//Initializing variables to store data
int motor_speed;
int motor_speed1;
void setup ( ) {
Serial.begin (9600); //Starting the serial communication at 9600 baud rate
//Initializing the motor pins as output
pinMode(EN_A, OUTPUT);
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
pinMode(EN_B, OUTPUT);
//Initializng the joystick pins as input
pinMode (x_key, INPUT) ;
pinMode (y_key, INPUT) ;
}
void loop () {
x_pos = analogRead (x_key) ; //Reading the horizontal movement value
y_pos = analogRead (y_key) ; //Reading the vertical movement value
if (x_pos < 400){ //Rotating the left motor in clockwise direction
motor_speed = map(x_pos, 400, 0, 0, 255); //Mapping the values to 0-255 to move the motor
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
analogWrite(EN_A, motor_speed);
}
else if (x_pos>400 && x_pos <600){ //Motors will not move when the joystick will be at center
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
}
else if (x_pos > 600){ //Rotating the left motor in anticlockwise direction
motor_speed = map(x_pos, 600, 1023, 0, 255);
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
analogWrite(EN_A, motor_speed);
}
if (y_pos < 400){ //Rotating the right motor in clockwise direction
motor_speed1 = map(y_pos, 400, 0, 0, 255);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
analogWrite(EN_B, motor_speed1);
}
else if (y_pos>400 && y_pos <600){
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
}
else if (y_pos > 600){ //Rotating the right motor in anticlockwise direction
motor_speed1 = map(y_pos, 600, 1023, 0, 255);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
analogWrite(EN_B, motor_speed1);
}
}
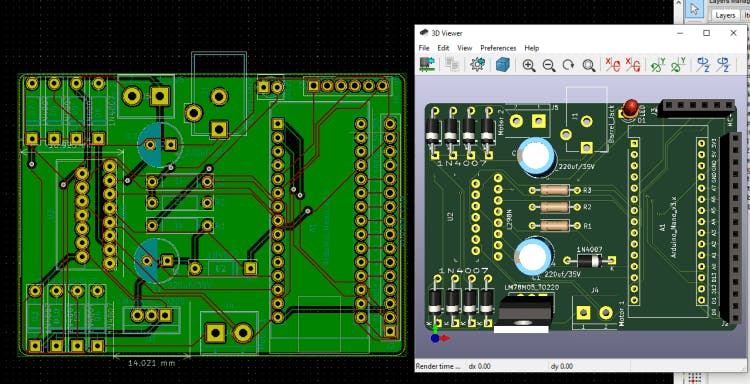
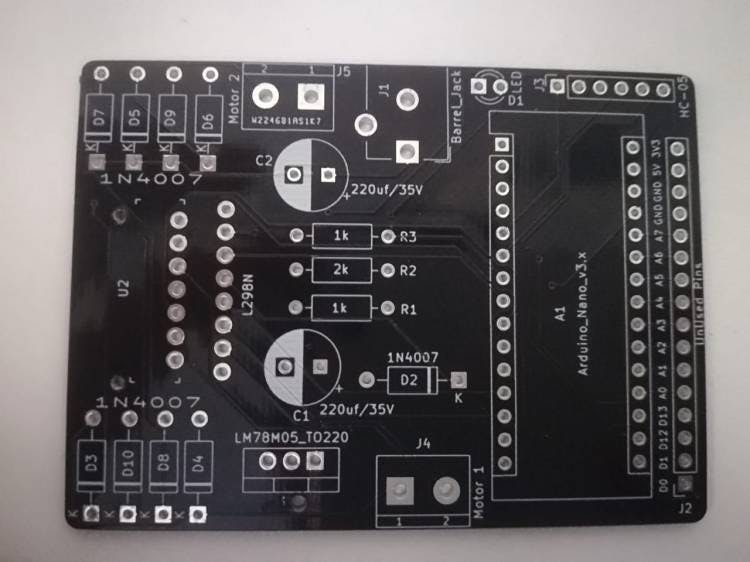
PCB设计
在确保面包板上一切正常后,我在 KiCad 上设计了 PCB。
以下是该项目的项目文件夹的链接。
设计PCB后,我生成了PCB制造所需的Gerber文件。
您可以通过以下链接下载 Gerber 文件
订购 PCB
现在我们已经完成了 PCB 设计,是时候订购 PCB 了。为此,您只需访问 JLCPCB.com ,然后单击“立即报价”按钮。
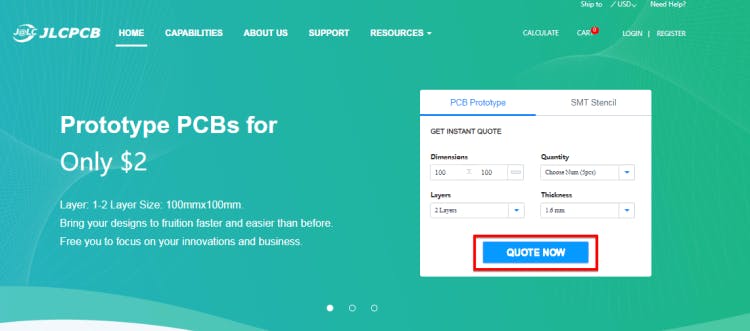
JLCPCB也是该项目的赞助商。JLCPCB(深圳市JLC电子有限公司),是中国最大的PCB样板企业,是专业从事快速PCB样板和小批量PCB生产的高科技制造商。您只需 2 美元即可订购至少 5 个 PCB。
要制造 PCB,请上传您在上一步中下载的 gerber 文件。上传 .zip 文件,或者您也可以拖放 gerber 文件。
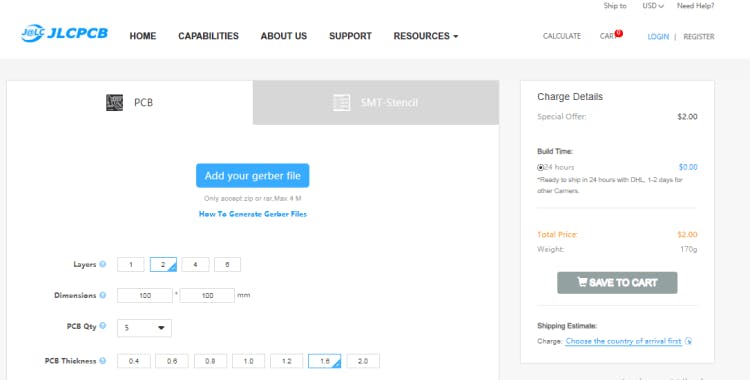
上传 zip 文件后,如果文件上传成功,您将在底部看到一条成功消息。
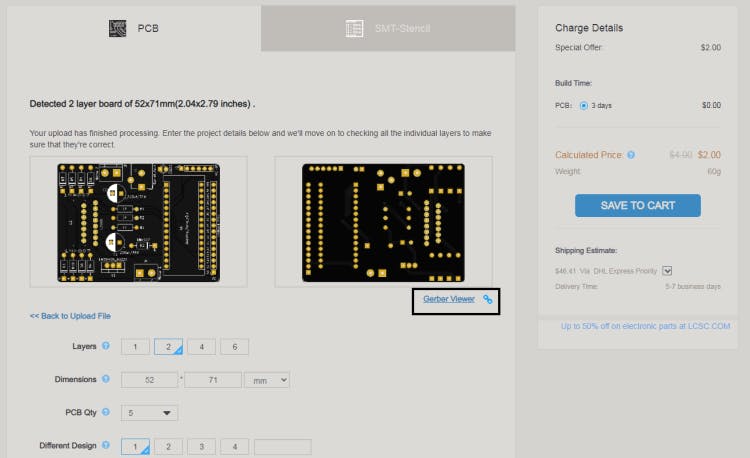
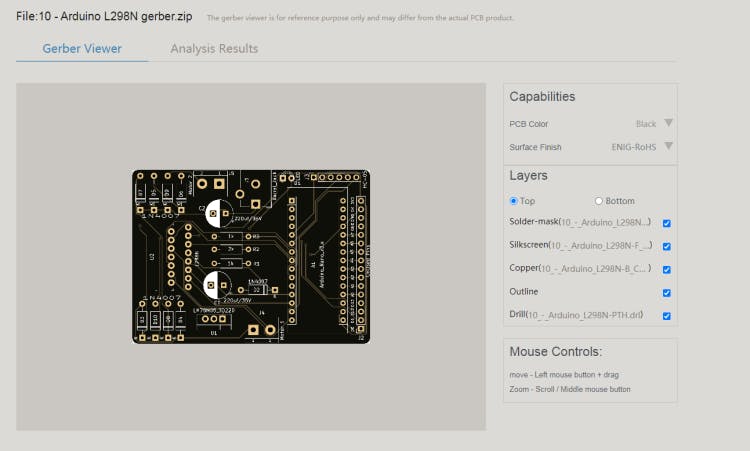
您可以在 Gerber 查看器中查看 PCB,以确保一切正常。您可以查看 PCB 的顶部和底部。
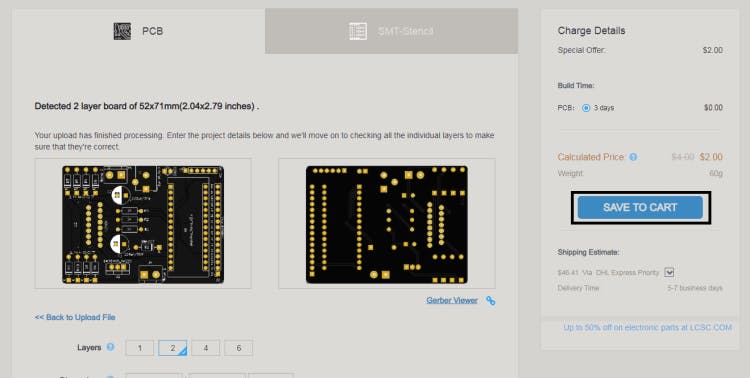
在确保我们的 PCB 看起来不错后,我们现在可以以合理的价格下订单。您只需 2 美元即可订购 5 个 PCB,但如果这是您的第一个订单,那么您可以花 2 美元购买 10 个 PCB。
要下订单,请单击“保存到购物车”按钮。
我的 PCB 花了 2 天时间制造出来,并使用 DHL 送货选项在一周内到达。PCB包装得很好,质量非常好。
在这里组装完所有东西后就是它的样子。
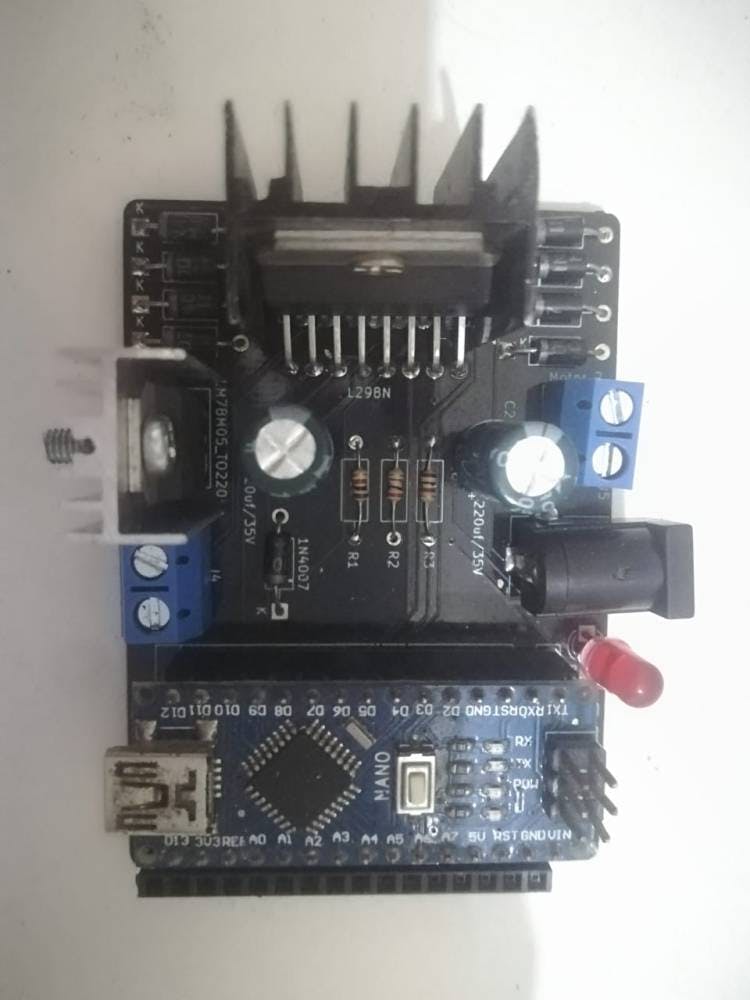
。
如果您有任何问题,请随时在评论部分向我们提问。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章







