

锁相环的工作原理是什么? 锁相环的PSIM仿真介绍
电子说
描述
锁相环的工作原理:
锁相环是一种消除频率误差为目的的反馈控制电路,它的基本原理是比较输入信号和反馈输入信号,提取二者的相位差,把此相位差转换频率控制信号,消除它们的频差。在锁相环电路的稳定态,输入信号和反馈输入信号可以有稳定的相位误差,但频率误差为零。当输出信号直接接回环路鉴相器时,锁相环可以实现输出信号对输入信号的相位跟踪。
根据系统组成的不同,这种跟踪可以是基于瞬时相位,也可以是平均相位。锁相环除对噪声有很好的过滤作用外,还有锁定时的无频差,易于集成且窄带和调制跟踪特性良好等优良性能。因此被广发应用于通信,雷达,制导,导航,仪器仪表等领域。
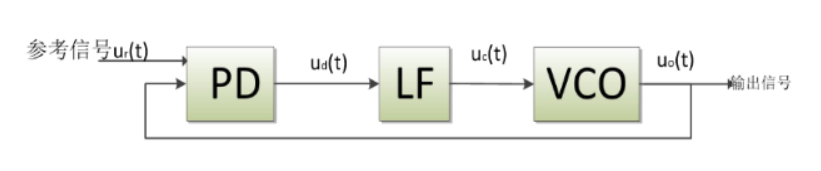
锁相环是一个典型的基于相位的负反馈控制系统。它有三个基本组成部分,它们分别是鉴相器(Phase Detector 简写为 PD),环路滤波器(Loop Filter 简写为LF)和电压控制振荡器(Voltage Controlled Oscillator 简写 VCO)[1]。
锁相环的PSIM仿真:
1
三相电压获取与坐标轴转换 :****
三相电压获取 :****
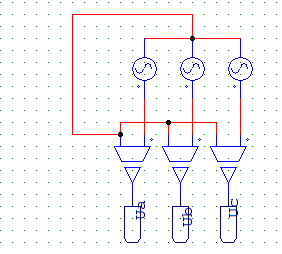
我们如上图所示可以用三个正弦电压源来模拟市网,经过一个电压采样来获取三相交流电的相电压。
2
Abc到αβ坐标轴转换
将静止坐标轴的三相abc空间电压向量转化到αβ静止坐标系的过程就叫做Clarke变换。
假设三相电压方程如下所示:
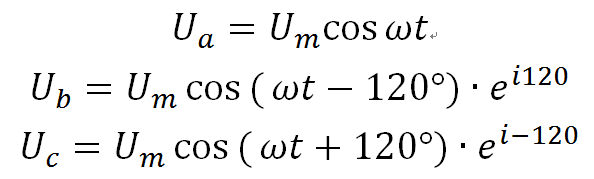
其中是时间轴上的三相电压的幅值变化,是空间上三相电压相差的电角度,即空间位置的差值。
重新建立一个直角坐标系,其中横坐标与向量重合,如下图所示:
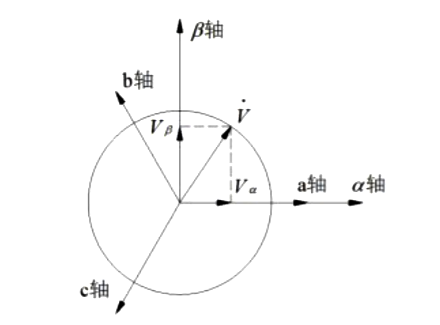
根据上图我们可以清晰得看出来三相电压的相对位置,此时:
在时间轴上始终满足三相电压:

然而在空间上,该三个空间相量求和:

从上述合成可知,三相空间矢量可以合成一个幅值恒定并且以角速度为逆时针旋转的一个空间向量Uabc。
等幅值变换指的是三相电压经过Clarke变换之后生成的一个向量幅值与A相电压相等,角速度ω也相等。在三相逆变电路中,其输出的最高相电压为2/3Ud。为了保持三相逆变的输出电压向量与电流向量都能够保持与市网电压相等,于是我们采用等幅值变换法来进行Clarke变换。其中的理论推导过程如下所示:
其数学公式如下图所示:
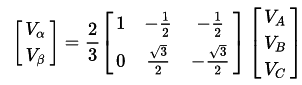
根据上式我们可以得知:当矩阵前添加一个系数2/3时,刚好可以使生成的向量与A相电压幅值相等,且合成向量经过等幅值变换之后:

目前这两个量随时间变化的角度与A相电压是相等的。因此,我们可以利用这个来追踪市网电压的相位和频率。
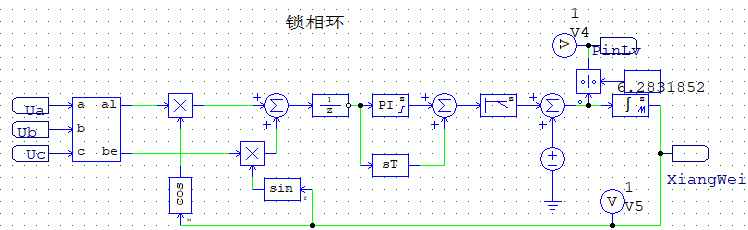
每遇到一个上升沿就重新开始记一次数,其中每一时刻都对应此时的电网电压相位通过αβ坐标变换获取三相电网电压相位的正余弦值,然后用

其中X为市网电压相位,Y为锁相环输出相位,然后经过PI控制器来调节输出为角速度,其中314的加入是为了提高该环节的响应速度,提前设置了一个参考量(可省去),其中添加了一个梯形积分环节来对角速度进行积分记录任意时刻的相位,由于相位变化范围为0~2pi,故这个积分器设置了一个超过上下限的时候就重置重新积分。
根据
可知,频率
可输出电网相位当X与Y相等的时候,输出的相位就是市网电压的相位,如果不相等,则误差就会经过一个PI控制器进行调节,然后经过一个自动重置的积分环节生成新的相位直至锁相成功。
实验结果:
锁相环的仿真结果如下,其中V4是获取的频率,V5获取的是市网的相位。
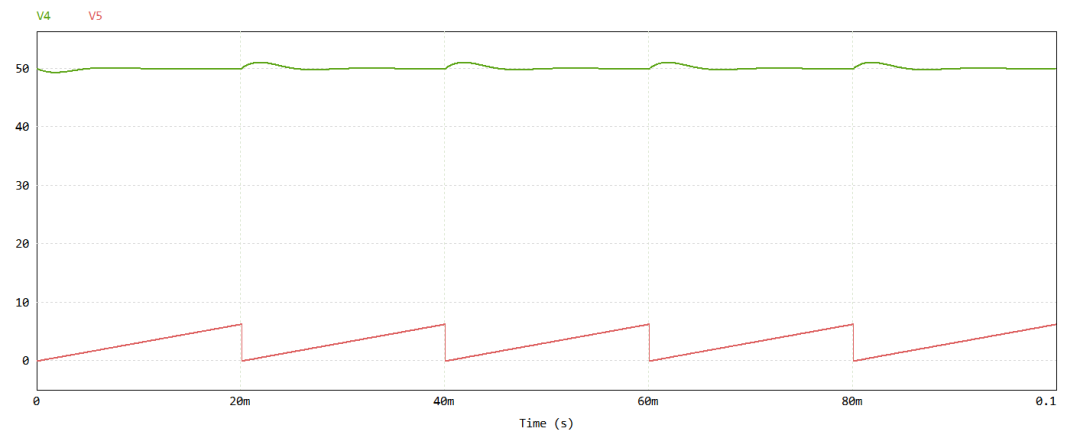
我们根据上图可以看出,锁相环可以实时获取市网电压的频率为50Hz左右。在进行并网操作时,我们会提前判断逆变器产生的相位与频率是否与市网电压一致来决定是否进行并网操作。
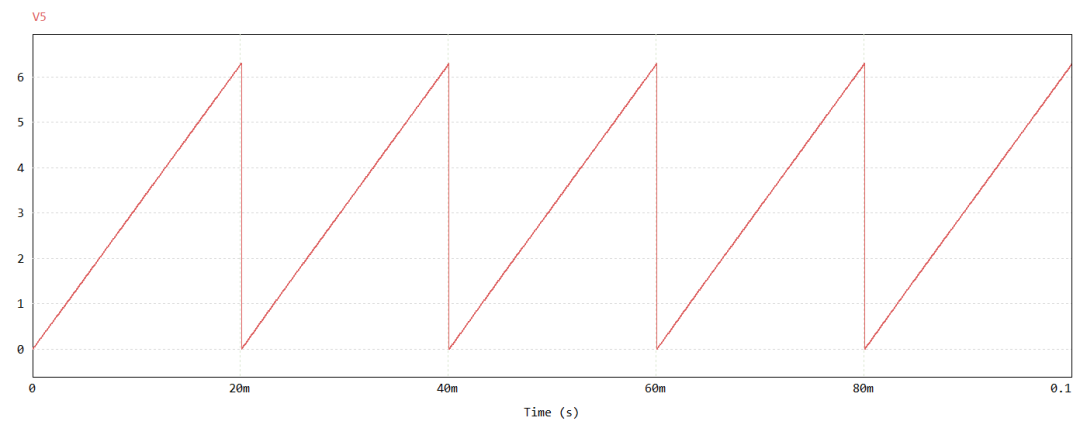
我们可以看到锁相环获取的相位从0到2π不断重复,正好对应Park变换合成向量在不断进行匀速圆周运动时与坐标轴的夹角进行周期变换。
-
什么是锁相环 锁相环的组成 锁相环选型原则有哪些呢?2023-08-01 8114
-
锁相环的构成和工作原理讲解2023-07-24 5185
-
关于锁相环(PLL)的工作原理2023-04-28 10610
-
模拟锁相环和数字锁相环区别2023-02-15 7167
-
锁相环的基本组成和工作原理2022-05-10 9428
-
锁相环(PLL)的工作原理及应用2022-03-29 16662
-
锁相环的基本组成及工作原理2020-11-03 17313
-
锁相环2011-10-26 17761
-
小数分频锁相环的工作原理2010-05-28 1467
-
锁相环(PLL),锁相环(PLL)是什么意思2010-03-23 6626
-
锁相环电路2009-09-25 7864
-
模拟锁相环应用实验2009-03-22 1369
-
锁相环设计仿真与应用2008-08-16 1531
全部0条评论

快来发表一下你的评论吧 !
