

UVM设计模式之状态模式介绍
电子说
描述
软件设计中,FSM(Finite-State Machine)分为3部分:状态(State),事件(Event),动作(Action)。
状态模式(State Pattern)是行为型(Behavioral)设计模式,将软件主机端的行为归类为各个状态,状态之间可以互相转化,每种状态的行为不相同;统一交给一个Context类型的模块负责调度各个状态的跳转;
硬件设计中的FSM,不仅是一种电路的描述工具,而且也是一种思想方法;数字逻辑本质上都可以归一化为FSM;RTL描述FSM可以归类为常用的几种方法,通常采用三段式的描述;
在我们的验证环境中,有时也需要一个组件专门负责FSM的建模;例如验证USB Device DUT时,验证环境需要模拟USB Host的行为;对于USB协议复杂的状态机,使用专门的FSM组件模拟,可以减少组件间的耦合;也可以将FSM组件的状态赋值到virtual interface上,通过波形协助debug;
并不是所有DUT模块中包含FSM,验证环境中就需要对应的FSM建模;RTL的硬件电路是cycle级的时序电路,采用FSM可以很好的描述算法运算;而验证环境都是事务级的基于事件的高级抽象模型,是否需要采用FSM根据验证环境而定;对于简单的设计,不需要模拟FSM;对于复杂的标准协议,VIP中都会采用FSM建模来完成,具有高内聚低耦合的好处。
Simple example
本篇对一个示例,分别使用两种方式来描述:
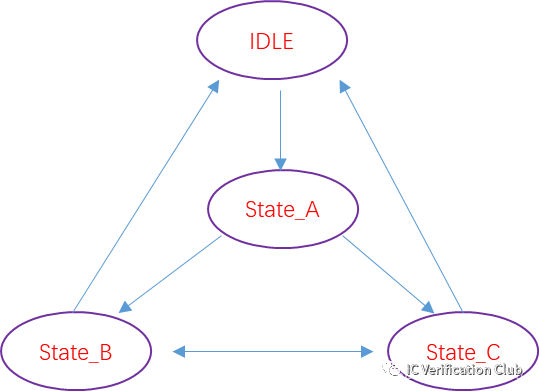
一个简单的FSM如下,分为4种状态;对于状态的跳转条件,本篇通过uvm_event类型的事件触发,验证环境中的实际情况可以是事件,某一个signal状态,或者if的判断等;不同状态下的Action,仅使用一句display代表,验证环境中的实际情况可以调用某一个task,对signal的驱动,或者调用其他组件的API等;仅做结构上的演示;
通过randsequence产生激励sequence,遍历状态机跳转条件;
class client;
state_machine FSM;
uvm_event_pool events_pool;
uvm_event to_idle,to_state_a,to_state_b,to_state_c;
function new();
events_pool = uvm_event_pool::get_global_pool();
to_idle = events_pool.get("to_idle");
to_state_a = events_pool.get("to_state_a");
to_state_b = events_pool.get("to_state_b");
to_state_c = events_pool.get("to_state_c");
endfunction
task rand_simulate();
for (int i=0;i<2;i++) begin
bit FLAG = 0;
randsequence (stream)
stream : first second third last;
first : state_a;
second : state_b {FLAG = 1;} | state_c;
third : if (FLAG ==1) state_c else state_b;
last : state_idle;
state_idle: {`INTERVALTIME;to_idle.trigger();};
state_a : {`INTERVALTIME;to_state_a.trigger();};
state_b : {`INTERVALTIME;to_state_b.trigger();};
state_c : {`INTERVALTIME;to_state_c.trigger();};
endsequence
end
endtask
......
......
use task
类state_machine包含四个状态的task;通过request_state_change函数实现状态跳转;每进入一个状态,对应一个线程,当跳出状态时,注意线程需要disable掉;
class state_machine;
typedef enum {
IDLE,STATE_A,STATE_B,STATE_C
} state_t;
uvm_event_pool events_pool;
uvm_event to_idle,to_state_a,to_state_b,to_state_c;
local state_t cur_state;
extern function new();
extern function void start();
extern function void request_state_change(state_t cur_state);
extern task do_idle();
extern task do_state_a();
extern task do_state_b();
extern task do_state_c();
endclass
function state_machine::new();
events_pool = uvm_event_pool::get_global_pool();
to_idle = events_pool.get("to_idle");
to_state_a = events_pool.get("to_state_a");
to_state_b = events_pool.get("to_state_b");
to_state_c = events_pool.get("to_state_c");
endfunction
function void state_machine::start();
cur_state = IDLE;
request_state_change(cur_state);
endfunction
function void state_machine::request_state_change(state_t cur_state);
case(cur_state)
IDLE:begin
fork
begin
$display("Enter %s state!",cur_state.name());
do_idle();
end
join_none
return;
end
STATE_A:begin
fork
begin
$display("Enter %s state!",cur_state.name());
do_state_a();
end
join_none
return;
end
STATE_B:begin
fork
begin
$display("Enter %s state!",cur_state.name());
do_state_b();
end
join_none
return;
end
STATE_C:begin
fork
begin
$display("Enter %s state!",cur_state.name());
do_state_c();
end
join_none
return;
end
default : begin
$display("Enter unknow state!");
$finish;
end
endcase
endfunction
task state_machine::do_idle();
state_t cur_state;
$display("IDLE : nothing to do!
");
fork: disable_fork
begin
to_state_a.wait_trigger();
//$display("do something!
");
cur_state = STATE_A;
end
join_any
request_state_change(cur_state);
endtask
task state_machine::do_state_a();
state_t cur_state;
$display("STATE_A : do something!
");
fork: disable_fork
begin
to_state_b.wait_trigger();
//$display("do something!
");
cur_state = STATE_B;
end
begin
to_state_c.wait_trigger();
//$display("do something!
");
cur_state = STATE_C;
end
join_any
disable fork;
request_state_change(cur_state);
endtask
task state_machine::do_state_b();
state_t cur_state;
$display("STATE_B : do something!
");
fork: disable_fork
begin
to_state_c.wait_trigger();
//$display("do something!
");
cur_state = STATE_C;
end
begin
to_idle.wait_trigger();
//$display("do something!
");
cur_state = IDLE;
end
join_any
disable fork;
request_state_change(cur_state);
endtask
task state_machine::do_state_c();
state_t cur_state;
$display("STATE_C : do something!
");
fork: disable_fork
begin
to_state_b.wait_trigger();
//$display("do something!
");
cur_state = STATE_B;
end
begin
to_idle.wait_trigger();
//$display("do something!
");
cur_state = IDLE;
end
join_any
disable fork;
request_state_change(cur_state);
endtask
use Sate Pattern
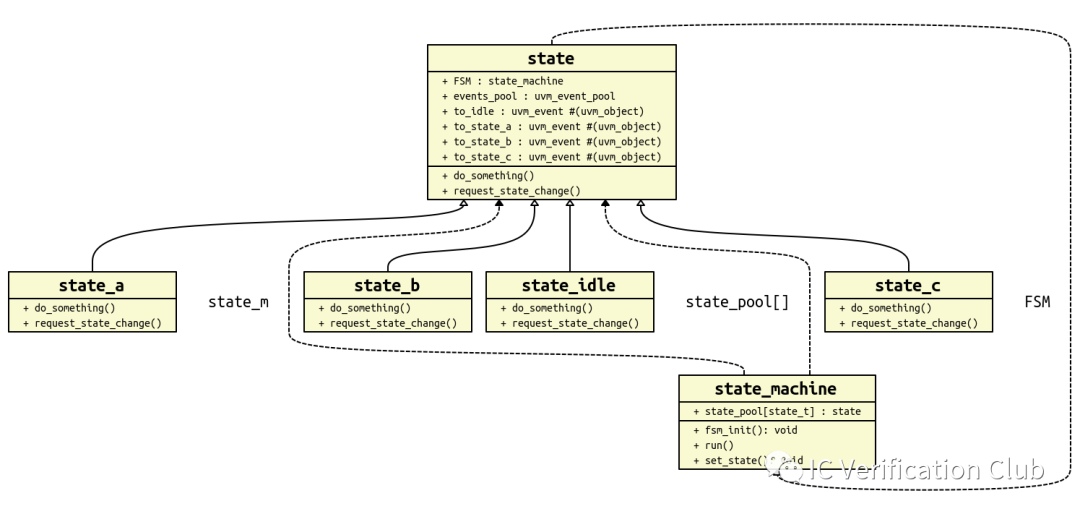
采用状态模式的设计,每个状态继承于virtual class state,实现各自的do_something和request_state_change;state_machine通过宏REGISTER_STATE创建各个state实例;state_machine中forvever执行;状态模式和策略模式的实现类似,都是使用OOP的组合 + 多态实现;
virtual class state;
state_machine FSM;
uvm_event_pool events_pool;
uvm_event to_idle,to_state_a,to_state_b,to_state_c;
function new();
events_pool = uvm_event_pool::get_global_pool();
to_idle = events_pool.get("to_idle");
to_state_a = events_pool.get("to_state_a");
to_state_b = events_pool.get("to_state_b");
to_state_c = events_pool.get("to_state_c");
endfunction
pure virtual task do_something();
pure virtual task request_state_change();
endclass
class state_idle extends state;
task do_something();
$display("STATE_IDLE : nothing to do!
");
endtask
task request_state_change();
state_t cur_state;
fork: disable_fork
begin
to_state_a.wait_trigger();
//$display("do something!
");
cur_state = STATE_A;
end
join_any
FSM.set_state(cur_state);
endtask
endclass
class state_a extends state;
task do_something();
$display("STATE_A : do something!
");
endtask
task request_state_change();
state_t cur_state;
fork: disable_fork
begin
to_state_b.wait_trigger();
//$display("do something!
");
cur_state = STATE_B;
end
begin
to_state_c.wait_trigger();
//$display("do something!
");
cur_state = STATE_C;
end
join_any
disable fork;
FSM.set_state(cur_state);
endtask
endclass
class state_b extends state;
task do_something();
$display("STATE_B : do something!
");
endtask
task request_state_change();
state_t cur_state;
fork: disable_fork
begin
to_state_c.wait_trigger();
//$display("do something!
");
cur_state = STATE_C;
end
begin
to_idle.wait_trigger();
//$display("do something!
");
cur_state = STATE_IDLE;
end
join_any
disable fork;
FSM.set_state(cur_state);
endtask
endclass
class state_c extends state;
task do_something();
$display("STATE_C : do something!
");
endtask
task request_state_change();
state_t cur_state;
fork: disable_fork
begin
to_state_b.wait_trigger();
//$display("do something!
");
cur_state = STATE_B;
end
begin
to_idle.wait_trigger();
//$display("do something!
");
cur_state = STATE_IDLE;
end
join_any
disable fork;
FSM.set_state(cur_state);
endtask
endclass
class state_machine;
local state state_m;
state state_pool[state_t];
function void set_state(state_t state);
$display("Enter %s state!",state.name());
state_m = state_pool[state];
endfunction
function void fsm_init();
`REGISTER_STATE(IDLE,idle)
`REGISTER_STATE(A,a)
`REGISTER_STATE(B,b)
`REGISTER_STATE(C,c)
this.set_state(STATE_IDLE);
endfunction
task run();
fsm_init();
forever begin
state_m.do_something();
state_m.request_state_change();
end
endtask
endclass
note
state_machine中还可以加入reset stop函数控制FSM的更多行为;封装更多API供其他模块调用;加入assertion做基于cycle的条件判断;加入covergroup收集功能覆盖率;
审核编辑:刘清
-
状态机编程实例-面向对象的状态设计模式2023-06-28 3598
-
数字IC验证之“什么是UVM”“UVM的特点”“UVM提供哪些资源”(2)连载中...2021-01-21 4418
-
数字IC验证之“典型的UVM平台结构”(3)连载中...2021-01-22 4154
-
基于多模式匹配的状态检测技术2011-06-22 1036
-
谈UVM之sequence/item见解 sequencer特性及应用(下)2018-02-19 5565
-
C语言设计模式的程序资料合集2020-11-16 1003
-
嵌入式软件设计之设计模式2021-10-21 906
-
状态模式(状态机)2021-12-16 1063
-
设计模式行为型:状态模式2023-06-07 1371
-
c语言设计模式--状态模式(状态机)2023-06-14 3640
-
CW32 低功耗模式的特性介绍2022-12-30 2495
-
一文详解UVM设计模式2023-08-06 5093
-
行为型设计模式在UVM中的应用2023-08-09 1805
-
UVM设计模式之访问者模式2023-08-11 1715
-
迭代模式在UVM中的应用有哪些2023-08-14 1402
全部0条评论

快来发表一下你的评论吧 !
