

基于FPGA的轻量级CAN总线控制器
描述
0、CAN总线介绍
1、CAN权威文档
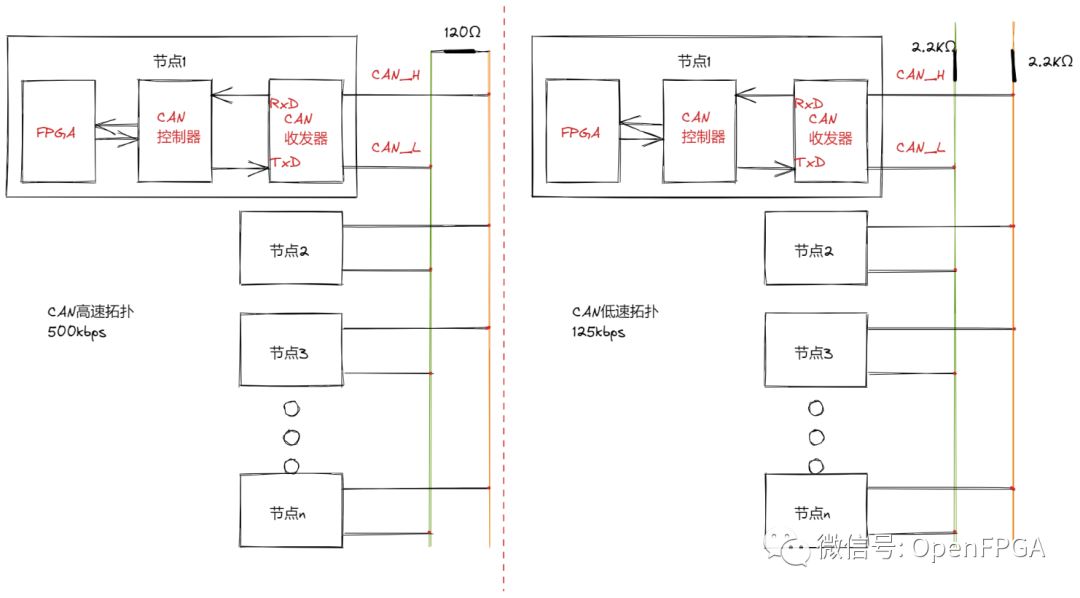
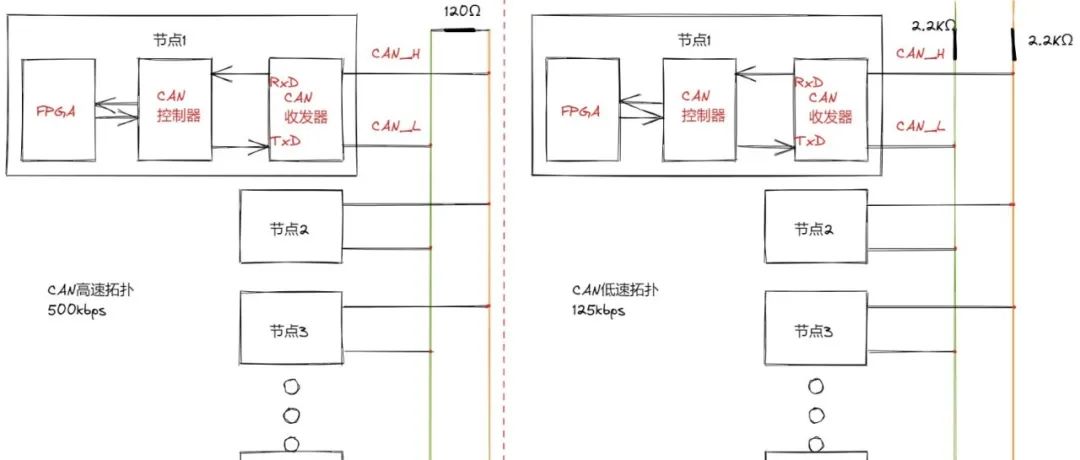
CAN总线有两个ISO国际标准:ISO11898 和 ISO11519。其中:
ISO11898 定义了通信速率为 125 kbps~1 Mbps 的高速 CAN 通信标准,属于闭环总线,传输速率可达1Mbps,总线长度 ≤ 40米。
ISO11519 定义了通信速率为 10~125 kbps 的低速 CAN 通信标准,属于开环总线,传输速率为40kbps时,总线长度可达1000米。
ISO 11898 文档在这里
3、【小梅哥FPGA】使用FPGA实现CAN通信的例子(NIOS+CAN IP)
这是小梅哥FPGA开发板上的实例,之所以放到第一个是因为这是目前FPGA实现CAN通信的比较完美的解决方案,单纯使用硬件描述语言的IP,会有一些不可预知的BUG,但是使用软核处理器是比较完美的。
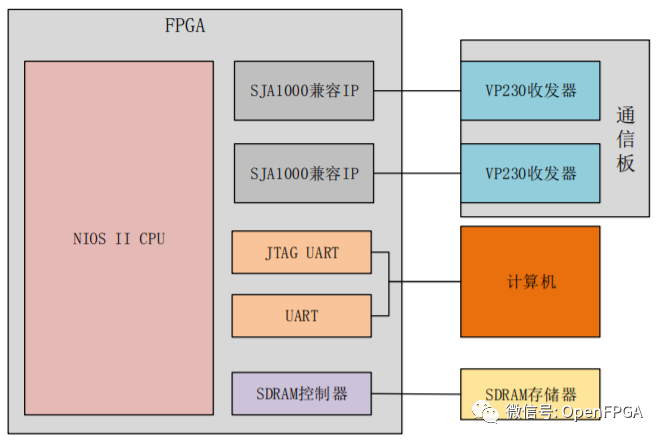
上图就是整个项目的系统方案,也很好理解,就不过多赘述了。
SJA100就是CAN控制器;
VP230就是CAN收发器。
PS:代码在上诉链接中。
4、liteCAN
基于 FPGA 的轻量级CAN总线控制器
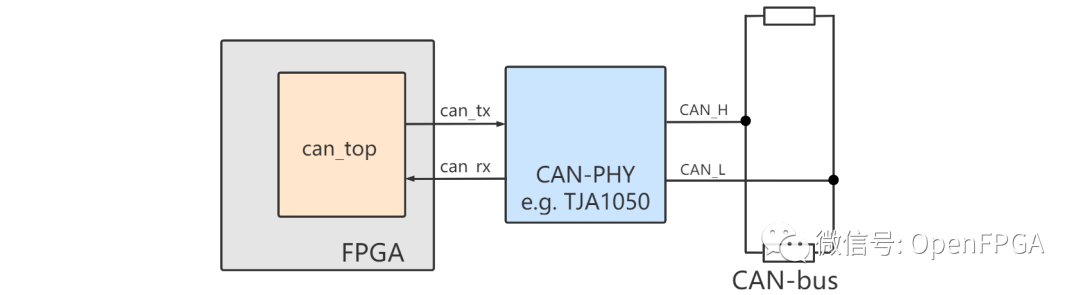
此项目实现的是CAN控制器,CAN收发器还是需要外挂。
简介
CAN总线作为工业和汽车领域最常用的通信总线,具有拓扑结构简洁、可靠性高、传输距离长等优点。CAN总线的非破坏性仲裁机制依赖于帧ID,CAN2.0A和CAN2.0B分别规定了11bit-ID(短ID) 的标准帧和29bit-ID(长ID) 的扩展帧,另外,还有远程帧这种数据请求机制。关于CAN总线的更多知识可以参考这个科普文章。
CAN总线的复杂机制决定了控制器设计的复杂性。本库实现了一个轻量化但完备的CAN控制器,特点如下:
本地ID可固定配置为任意短ID。
发送 : 仅支持以本地ID发送数据长度为4Byte的帧。
接收 : 支持接收短ID或长ID的帧,接收帧的数据长度没有限制 (即支持 0~8Byte ) 。
接收帧过滤 : 可针对短ID和长ID独立设置过滤器,只接收和过滤器匹配的数据帧。
自动响应远程帧 : 当收到的远程帧与本地ID匹配时,自动将发送缓存中的下一个数据发送出去。若缓存为空,则重复发送上次发过的数据。
平台无关 :纯 RTL 编写 (SystemVerilog),可以在 Altera 和 Xilinx 等各种 FPGA 上运行。
设计文件说明
设计相关的4个文件在 RTL 文件夹中,各文件功能如下表。你只需将以上4个文件包含进工程,就可以调用can_top.sv进行更高层次的CAN通信业务的二次开发。
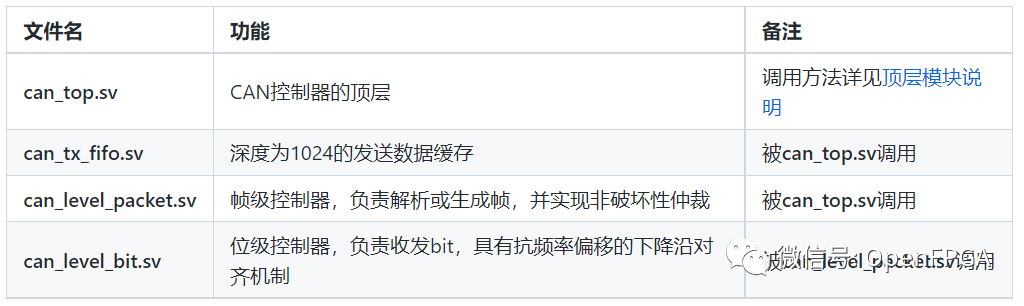
此项目非常完整,项目由中文说明,完备的TB及测试方案。
5、CAN-fpga
项目没有任何介绍,看文件结构,是基于Quartus II建立的,结构和上一项目完全没什么区别。整个项目应该是完备的,有兴趣可以看看。
6、sja1000
这个就是Verilog编写的外挂SJA100的驱动程序,这里就不过多介绍了。
7、Click_MCP25625
这是MCP25625(控制器+收发器集合)的SPI驱动(ARM单片机的)。
这个项目和这个功能一样,就不展开描述了。
USB-CAN(调试利器)
因为本期没几个开源项目,所以这里在推荐几个开源的USB-CAN方案,大部分都是可以直接打板使用的。
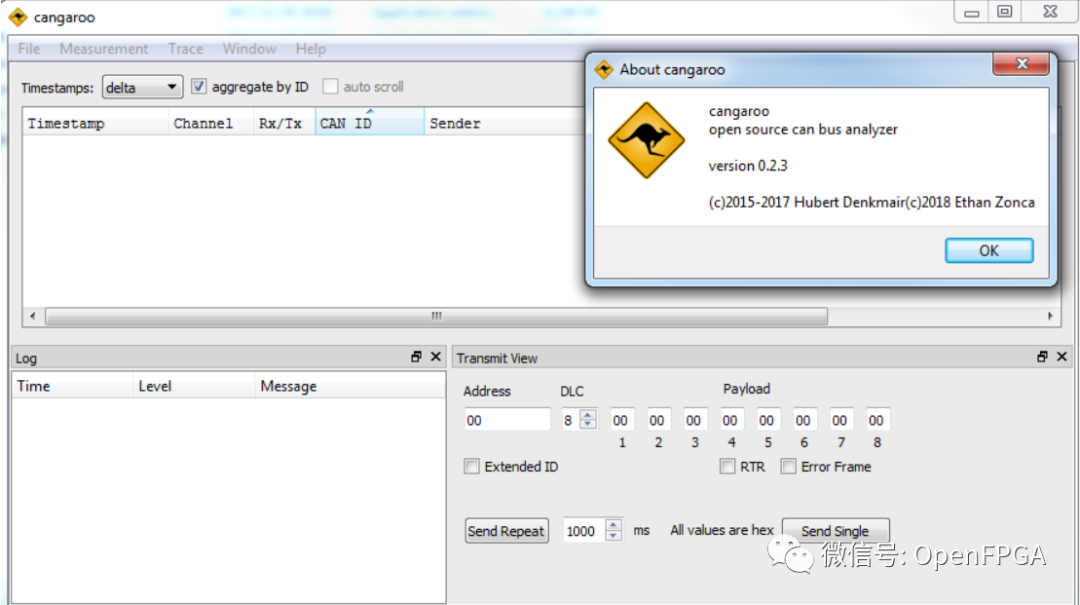
一、stm32f0 + CAN收发器TJA1051/3
ta有完全开源的软硬件及上位机支持,支持windos和linux Stock can并且都免驱哦。且支持Python。
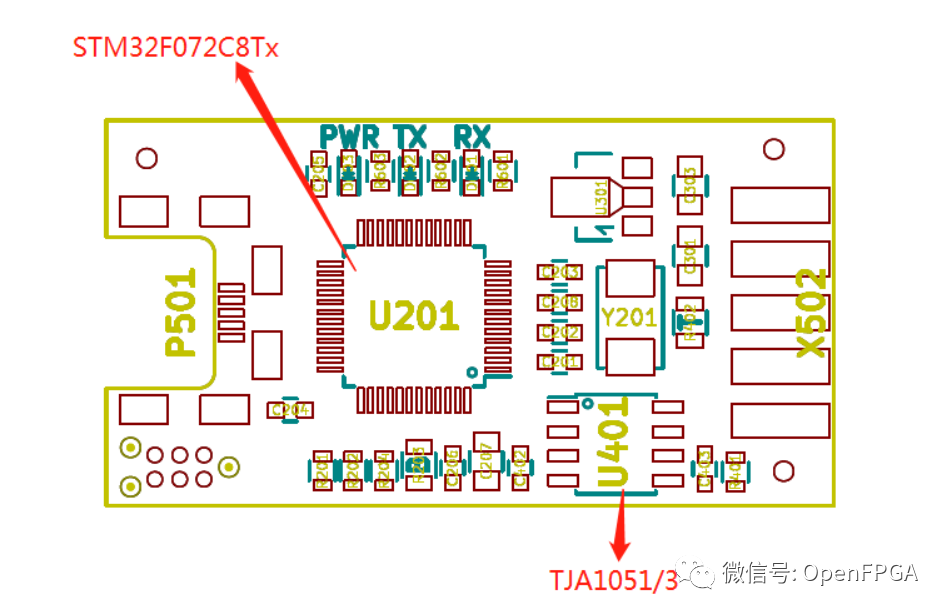

上述的方案某宝上也有成品。
二、KS22方案
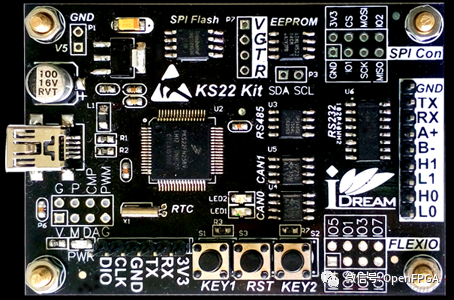
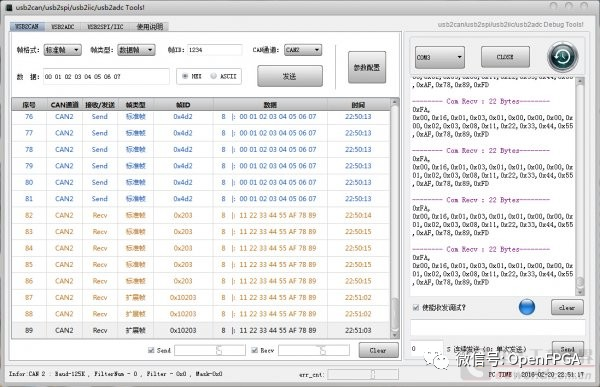
相关文档及上位机:
三、open-usb-can
文档很完备。
该项目是基于 ATMega32U2 和 MCP2515 SPI CANBus 控制器的 USB 转 CANBus 接口。
最后,还是感谢各个大佬开源的项目,让我们受益匪浅。后面有什么感兴趣方面的项目,大家可以在后台留言或者加微信留言,今天就到这,我是爆肝的碎碎思,期待下期文章与你相见。
审核编辑:汤梓红
-
CAN总线控制器Verilog代码2008-05-20 1452
-
基于CAN总线的客房通信控制器的设计2009-06-13 922
-
基于STM32和FPGA的CAN总线运动控制器的设计2013-01-31 1402
-
FPGA实现CAN总线控制器源码2016-06-07 1162
-
基于FPGA和CAN控制器MCP2515设计惯导系统的CAN总线2016-07-13 1704
-
基于DSP_FPGA与CAN总线的跟踪控制器设计2017-10-21 951
-
基于FPGA的CAN总线控制器SJA1000软核的设计方案解析2017-12-07 3151
-
如何使用FPGA进行CAN控制器软核的设计与实现2019-07-19 1819
-
如何使用FPGA和CAN控制器MCP2515实现惯导系统的CAN总线接口的设计2021-01-27 2241
-
如何用FPGA实现CAN总线通信控制器2022-07-29 3734
-
基于FPGA的CAN总线控制器的设计2023-05-18 2833
-
基于FPGA的CAN总线通信节点设计2023-06-18 4692
-
CAN总线控制器是什么意思2024-09-03 4126
-
CAN总线控制器的工作原理2024-09-30 3710
-
基于FPGA的轻量级CAN总线控制器实现方案2026-04-03 5728
全部0条评论

快来发表一下你的评论吧 !
