
资料下载


M-G366PDG0规格书

M-G366PDG0是一款体积小、重量轻的高精度传感器,具有沙痂低噪声、高稳定性、陀螺偏置不稳定性、角随机游走、校准稳定性(偏差、比例因子、轴向对准)、接口:SPI / UART、校准温度:−40°C至+85°C、电源电压:3.3 V等特点。适用于自动驾驶车辆导航系统、振动控制和稳定、指向和跟踪系统等场景,为各种应用场景提供了更加精确的控制和稳定性。
体积小,重量轻: 24 x 24 x 10 mm3, 10 g
沙痂低噪声、高稳定性
陀螺偏置不稳定性:1.2°/h
角随机游走: 0.08°/√h
校准稳定性(偏差、比例因子、轴向对准)
接口:SPI / UART
校准温度:−40°C至+85°C
电源电压:3.3 V

推荐的操作条件

规格
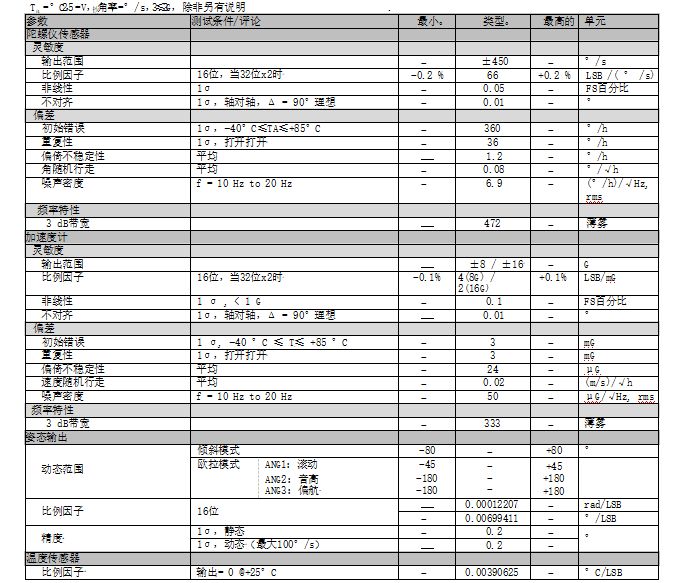
* 1)这是一个用于内部温度补偿的参考值。这并不能保证该值给出了内部温度的绝对值。*2)这是上16位(TEMP_HIGH)的温度比例因子。
*3)每天打开/打开,估计连续5天的变化。
*4)偏航轴不能补偿由漂移造成的误差。
*5)动态精度是基于从静止状态下测量到的测量数据。可以达到的精度取决于输入的运动。*6)姿态输出精度是基于GLOB_CMD2[0x16(W1)],bit[5:4]=00:modeA的测量数据。*7)可通过寄存器设置进行选择。
注)规格中的值基于工厂校准的数据。这些值可能会根据产品的使用方式而变化。注意)的类型。规范中的值是平均值或1个σ值。
注)除非另有说明,否则Max。/最低值。规范中的值是设计值或Max。/最低值。在工厂测试中得到的值。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




