

 小鹏钢铁助理亮相!机器手或迎来“iPhone时刻”
小鹏钢铁助理亮相!机器手或迎来“iPhone时刻”
描述
电子发烧友网报道(文/梁浩斌)最近小鹏汽车CEO何小鹏在微博上放出了一个视频,展示“钢铁助理”操作手机屏幕预定小鹏MONA M03的过程。在视频中机器手机器手动作流畅,结构精密,自由度较高,滑动屏幕和点按的过程很流畅,并且下单过程中滑动误触发选中文字后,也能快速修正操作,有点“真AI”的味道了。
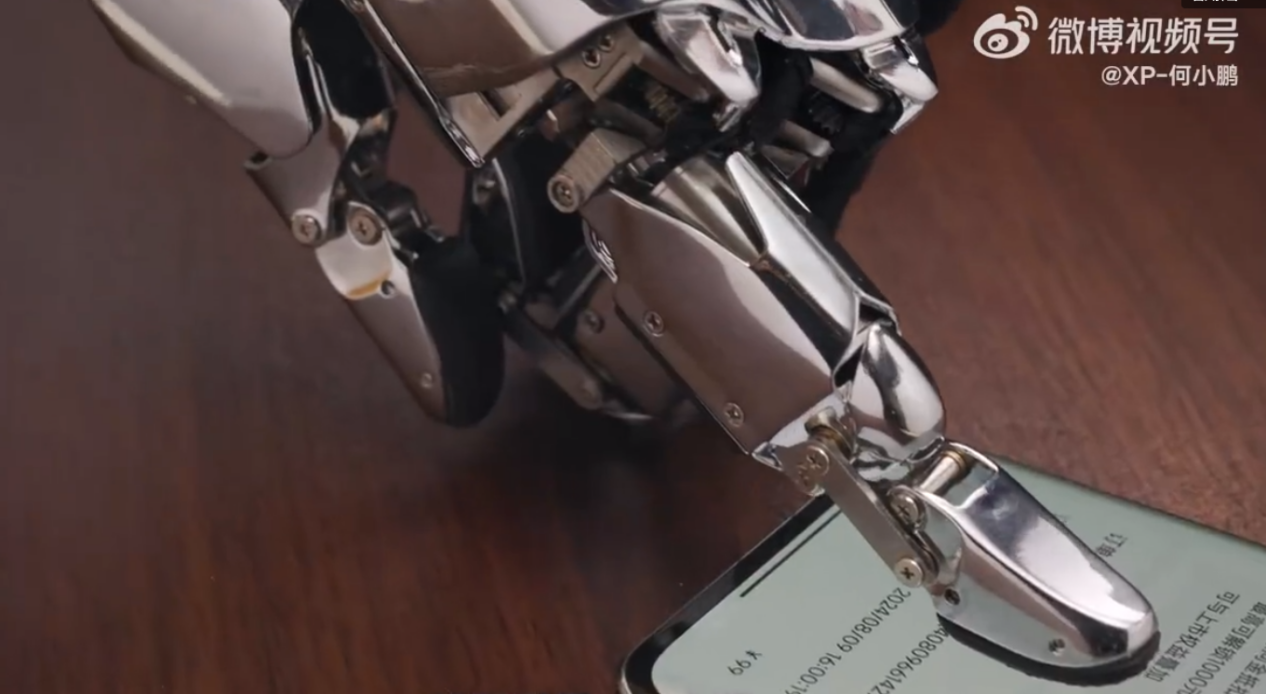
来源:微博@XP-何小鹏
何小鹏表示,机器人灵活度高且拥有触觉能力,未来可以在工业场景中处理非常精细的任务,今年内还会与大家同步小鹏在AI及大型硬件的新进展。今年机器手和机器人领域确实有不少新的硬件出现,伴随AI的辅助,或许有望迎来机器手的“iPhone时刻”。
机器人硬件涌现,五指灵巧手受关注
小鹏其实在去年的1024科技日上就展示了一款双足智能机器人PX5,当时据官方介绍,PX5可实现业界顶级的双足行走及越障碍能力。通过自研的高性能关节,实现了高稳定性的机器人行走能力,可以完成2小时以上的室内外行走和越障。在演示视频中,PX5展示了踢足球、骑平衡车等高难度项目。

小鹏类人灵巧手和仿人机械臂 来源:小鹏汽车
作为双足机器人的一部分,小鹏还在研发类人的机器手和机械臂。其中类人灵巧手单手具有11个自由度,两根手指可以夹起1KG的东西,同时手指具备感知触觉的能力,而自重仅430g;超轻量级仿人机械臂有7个自由度,定位精度可以做到0.05mm,单臂最大负载可以达到3KG,自重5KG,最大末端线速度为1m/s。
灵巧手和仿人机械臂配合,小鹏展示了拿起游戏手柄、使用电动螺丝刀、提起箱子、捏起圆珠笔、倒水、抽纸、捏起塑料球等操作,但动作仍稍显生硬。
从视频效果来看,今年小鹏在灵巧手上有了比较明显的进步,首先是动作更加流畅自然,可能是得益于新的驱动器,另外是手部的自由度可能也有所增加。在两个月后的小鹏2024科技日上,小鹏可能会正式展示新的灵巧手,并公布更多细节。
今年7月的2024世界人工智能大会(WAIC 2024)上,特斯拉在中国首次展示了其第二代的Optimus人形机器人实物。特斯拉第二代Optimus最早在去年12月首次亮相,当时特斯拉发布了一段视频,展示了第二代Optimus的能力。
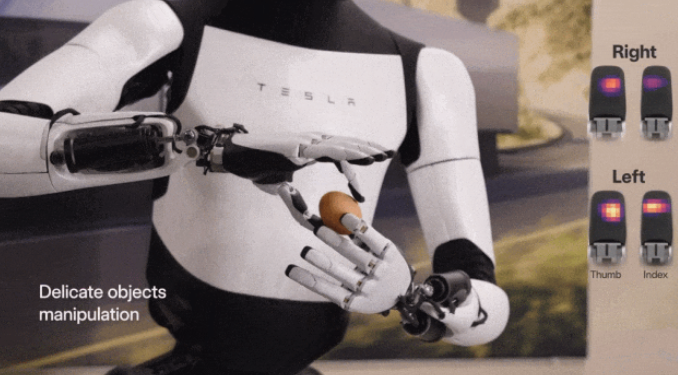
来源:特斯拉
特斯拉称二代Optimus相比上一代减重10kg,同时行走速度提升了30%,在足部增加了一些被动关节,看起来走路动作相对自然,不过实际行走速度依然很慢。第二代Optimus的关键升级在于手部。
第二代Optimus的机器手具有11个自由度,视频演示动作十分灵活流畅,同时所有手指都有触觉传感器,可以实现精细操作,比如两指捏住鸡蛋。在上面图片中,右侧就显示了当前双手手指末端检测到的压力。
当然,机器人只有硬件是无法投入实际应用中的,为了展示Optimus的AI能力,特斯拉早前还放出了一段新的视频,展示Optimus在电池工厂的产线上对电芯进行分拣。Optimus采用了端到端的神经网络,通过FSD硬件计算以及视觉传感器、手部触觉和力传感器等,驱动机器完成相应的工作。
说到机器手,明星初创公司Figure AI刚刚发布的号称“地表最强”人形机器人就更加值得关注。Figure成立于2022年,投资者包括OpenAI、英伟达、微软、亚马逊集团创始人贝索斯等。Figure在8月发布了人形机器人Figure02,硬件上采用了外骨骼设计,并在膝盖和手肘关节附近采用新型复合材料的蜂窝状可压缩组织;在执行器上也进行了升级,手臂关节执行器A2款扭矩50NM,对应的关节活动最大角度范围148°,下肢腿关节展示了2款旋转关节执行器:L1款扭矩150NM用在大腿靠近髋关节位置,关节活动最大角度范围195°;L4款扭矩150NM用在膝关节,关节活动最大角度范围135°。

关键的第四代机器手达到了惊人的16个自由度,可承重25公斤,每根手指都由一个集成了传感器和电机的单元驱动。另外在手腕上也有创新,提供了与人类手腕相似的运动范围同时,将所有电力和传感信号线路封装并引导到手和手指,团队也表示他们的目标是让机器人能够抓住所有人类能够抓住的物体。
另一家来自国内的机器人公司宇树,则换了一条思路来打造机器人。宇树在去年推出旗下首款通用人形机器人H1,这款机器人结构相对简单,没有机器手,主要是用于实验人形机器人行走算法。而宇树的优势在于自研电机能力,H1膝关节上使用了宇树自研的M107关节电机,提供360N·m的峰值扭矩,而髋关节和踝关节的扭矩分别为220N·m和45N·m,手臂关节为75N·m。H1的所有关节单元,包括伺服电机、减速器和控制器均由宇树自主研发和生产,当时9.9万美元的售价,震惊了国内外机器人领域的大佬,后来的国内外高校的机器人算法研究中,都能看到宇树H1的身影。

来源:宇树官网
短短一年不到的时间,宇树又推出了G1,体型更小,重量更轻,自由度更高。G1基础版没有灵巧手全身23个自由度,EDU版配置灵巧手最高43个自由度。其中单腿有髋关节3个自由度、膝关节1个自由度加上踝关节2个自由度;单臂有肩关节3个自由度加肘关节2个自由度,还能额外选配2个自由度的腕关节。
G1 EDU搭载了Dex3-1三指力控灵巧手,和以往人形机器人上常见的五指仿生手不同,Dex3-1大拇指有3个自由度,食指有2个自由度,中指2个自由度还可以加装2个手腕自由度。Dex3-1三指力控灵巧手通过力位混合控制技术,使G1能够模拟人手的精准操作能力,还能加装多点触觉阵列,实现多点触碰,模拟人体精细的触感,大幅提升实时反馈触觉信息的能力。
虽然从视频演示中G1的性能已经足够惊艳,但更加令人感叹的是其9.9万元的起售价。当然,如果要用于二次开发,以及更高性能需求的应用,就需要G1 EDU版本选配NVIDIA Jetson Orin高算力模块,而该产品售价未有公开。
机器人五指灵巧手关键部件有哪些?
为了实现仿人类的灵活手部结构,机器人灵巧手需要多种精密部件进行驱动。比如电机需要采用空心杯电机等特定类型的伺服电机,用于提供手指所需的精确位置和速度控制,高精度和响应速度取决于电机性能。
目前空心杯电机在海外主要是Faulhaber、Portescap、Allied Motion、Maxon Motor、尼得科等为主要供应商。国内供应商在近几年呈现爆发态势,包括拓邦股份、兆威机电、鼎智科技、鸣志电器、伟创电气等都有不俗的实力,并开始进入人形机器人市场。
减速器作为配合电机使用的部件,被用于减小电机的转速并增加扭矩输出,这在机器人领域也是关键部件之一。在机器人灵巧手中,可能会使用精密行星减速器、RV减速器和谐波减速器等不同类型,以满足不同的精度和扭矩需求。
为了实现灵巧手的触觉反馈,需要用到多种传感器,包括力矩传感器,用于测量施加在手指上的力和力矩;触觉传感器,用于感知接触物体的形状、硬度、纹理等;位置传感器,用于监测手指的位置和姿态;温度传感器,用于监测工作环境的温度变化以及物体温度等。
以触觉传感器为例,目前全球市场上主要企业有Tekscan、Pressure Profile Systems、Sensor Products、Weiss Robotics、Syn Touch等公司,不过机器人领域的产业链也正在发生变化,近年有更多的玩家入局并推出创新产品。比如Melexis推出的触觉传感器 Tactaxis、国内帕西尼感知科技推出的PX-6AX多维触觉传感器等。
PX-6AX柔性阵列上亚毫米级别的微小形变场能被瞬间捕捉,同时还能为机器人提供滑动、摩擦、纹理、温度等15种多维信息,采样频率最高可达1000Hz,最小可测量0.01N的力,提供超过300万次的测量寿命。
小结:
可以看到今年以来,人形机器人开始更加关注灵巧手的部分,手作为人类工作中最重要的身体部位,未来要想使用人形机器人代替人类进行通用工作,必然需要先在机器手上先实现对人类的仿真,这个时候反而行走方式可能还有一些技术方向上的选择空间,比如轮足等。所以未来一段时间里,机器人灵巧手能否成为行业重点攻克的方向,并最先将其投入到实际应用,我们可以拭目以待。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
【DIY作品秀】用iPhone制作智能机器人2012-01-10 16033
-
求助:寻求一份助理工程师或研发助理工作2012-03-13 2821
-
教育机器人制造厂家,选择鸥鹏!2016-03-30 3832
-
鸥鹏机器人产品应用案例2016-04-11 6009
-
世界首个触觉传递遥操作机器手亮相亚马逊科技展2019-06-16 3581
-
助理机器人开源分享2022-10-21 841
-
谷歌助理和自控机器人汽车2022-11-16 886
-
儿童助理机器人开源项目2022-12-09 837
-
小鹏汽车迎来新AI负责人,研发XNGP技术2024-03-26 1621
-
英伟达预测机器人领域或迎“GPT-3时刻”2024-09-20 1620
-
看点:小鹏机器人IRON现身小鹏展台 比亚迪调整分红方案 全世界都在“围剿”谷歌2025-04-23 1199
-
小鹏汽车亮相2025慕尼黑国际车展2025-09-08 1323
-
小鹏人形机器人IRONI走“猫步”亮相,网友:太像真人!预计2026年量产2025-11-06 1099
-
小鹏汽车迎来第100万台整车正式下线2025-11-25 762
-
小鹏IRON人形机器人三季度亮相,年底量产明年交付2026-05-29 1036
全部0条评论

快来发表一下你的评论吧 !
