
资料下载


光流传感器数据书册(英文版)
renfeng01
分享资料个
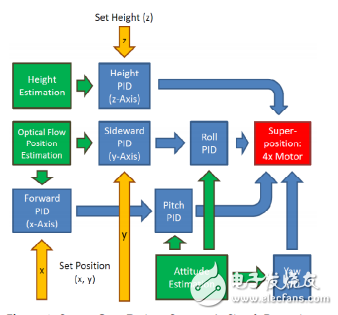
Abstract A procedure to control all six DOF (degrees of freedom) of a UAV (unmanned aerial vehicle) without an external reference system and to enable fully autonomous flight is presented here. For 2D positioning the principle of optical flow is used. Together with the output of height estimation, fusing ultrasonic, infrared and inertial and pressure sensor data, the 3D position of the UAV can be computed, controlled and steered. All data processing is done on the UAV. An external computer with a pathway planning interface is for commanding purposes only. The presented system is part of the AQopterI8 project, which aims to develop an autonomous flying quadrocopter for indoor application. The focus of this paper is 2D positioning using an optical flow sensor. As a result of the performed evaluation, it can be concluded that for position hold, the standard deviation of the position error is 10cm and after landing the position error is about 30cm. Keywords Autonomous UAV, Quadrocopter, Quadrotor, Optical Flow, Positioning, Navigation

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





