
资料下载


远程康复信息采集控制系统的组成及其设计与实现
分享资料个
远程康复系统中,信息采集系统是其主要的组成部分,如何远距离对信息采集系统进行有效控制,其实现效果的优劣,实现速度的快慢,对整个系统的性能起着关键性的作用。由于远程康复信息采集系统是多变量、非线性的时变系统,很难建立整个同步控制系统的精确数学模型。因此就需要利用一种有效的控制方法——模糊控制。
2 远程康复信息采集控制系统的构成
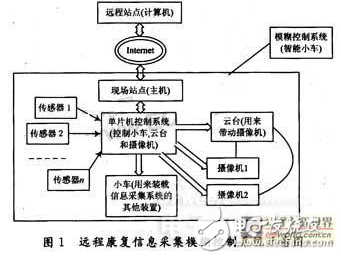
远程康复信息采集控制系统示意图如图1所示。该系统就是一个辅助摄像用的机器人,它可以接受指令以某条空间曲线为路径来观察患者。此控制系统主要由两个功能模块来实现,一是现场站点的PC机,通过Internet来接收远方站点的控制命令,经过模糊控制算法处理之后,再通过RS 232串口传给单片机处理系统,来控制小车、云台、摄像机的运动。另外现场站点的PC机还可以将从摄像机采集到的图像信息根据要求进行处理,再通过Internet以适当的方式呈现给远方站点,供远方的康复专家和辅助设计厂商诊断、设计之用。二是单片机控制系统,主要用来控制小车、云台、摄像机的运动,使其能够到达合适的方位,以便远方康复专家不受时空限制、实时地观察患者的身体状况,进行远程诊断和评估。单片机控制系统还可以对检测电机到位等传感器的信号进行处理,并将控制模糊控制系统执行单元的情况反馈给远方站点。简单来说,此模糊控制系统主要实现自动控制装载信息采集装置的小车、带动摄像机的云台和摄像机的运动,根据要求采集实时视频或图像信息,供诊断和辅助产品设计之用。
3 远程康复信息采集系统的模糊控制设计
3.1 信息采集系统的模糊控制策略
本系统的输入变量为:小车到目标的转向角,小车到目标的距离,云台距离目标的高度,摄像机与目标的方向角和距离,一共6个输入变量。输出变量为:小车舵电机的运行速度、方向,小车驱动电机的运行速度、方向,带动云台上下运动的电机的运行速度、方向和云台的四个转向一共10个输出变量。所以该信息采集系统初步控制对象就有6个输入变量和10个输出变量,属于多输入一多输出结构的模糊控制器。
通过模糊解藕将此多输入一多输出模糊控制结构转化为单变量模糊控制器来进行设计。下面以控制小车驱动电机的速度为例来详细说明模糊控制规则的建立。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




