
资料下载


×
摄像头智能循迹小车设计方案
消耗积分:1 |
格式:rar |
大小:0.4 MB |
2017-11-21
分享资料个
智能循迹小车可以根据前端摄像头的输入图像识别出道路状况,通过优化智能车的软硬件设计,能够确保其在不同环境下行驶的快速性和准确性,本文以Kinetis60为核心处理器,完成了智能车路径检测、速度检测、数据传输模块、电机舵机驱动模块的设计与实现,并在此基础上提出了一种利用摄像头实时图像进行智能车循迹判断的方法,能够提取出精确的路径特征信息,实践证明该方法具有可行性。
随着智能交通系统的广泛应用,智能车的系统控制也逐步成为一项新兴技术,该领域涵盖了控制、模式识别、传感技术、电子、电气、计算机、机械等多个学科。本方案采用摄像头作为信号采集的传感器,根据摄像头采集的图像进行精密计算,确定速度参考和舵机转向参考。摄像头组的智能车对于道路信息预测能力强,而且摄像头对道路的探测精细,视角范围大,因此受到众多智能车设计者的欢迎。但摄像头图像受周围光线的影响大;算法运算量大,算法复杂,需要占用较多的NCU资源,因此其中图像识别算法的设计成为系统设计的关键步骤。
1系统设计
智能车系统由核心处理器KINETIS60、路径检测模块、起跑线检测模块、车速检测模块、电源模块,无线数据传输模块、电机驱动模块、舵机驱动模块组成。其中摄像头组的路径检测模块由OV7620摄像头实现。
车速检测模块由编码器构成,实现速度的实时采集。电机驱动模块由八片IRF3205构成H桥来实现。电源模块由三块LM2940组成。舵机使用S-D5连接至PWM引脚,起跑线检测模块由两个TCRT5000以及一个LM339组成。无线数据传输通过NRF24L01进行数据传输。
智能车由路径传感器采集得到前方道路的图像,从中提取出有用信息,判断所处的跑道类型(直道,大弯道,S弯道),确定小车的舵机转向及车速。从而通过电机和舵机驱动小车流畅地在跑道上行进。系统框图如图1所示。
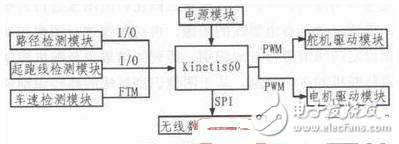
图1 总体结构框图
随着智能交通系统的广泛应用,智能车的系统控制也逐步成为一项新兴技术,该领域涵盖了控制、模式识别、传感技术、电子、电气、计算机、机械等多个学科。本方案采用摄像头作为信号采集的传感器,根据摄像头采集的图像进行精密计算,确定速度参考和舵机转向参考。摄像头组的智能车对于道路信息预测能力强,而且摄像头对道路的探测精细,视角范围大,因此受到众多智能车设计者的欢迎。但摄像头图像受周围光线的影响大;算法运算量大,算法复杂,需要占用较多的NCU资源,因此其中图像识别算法的设计成为系统设计的关键步骤。
1系统设计
智能车系统由核心处理器KINETIS60、路径检测模块、起跑线检测模块、车速检测模块、电源模块,无线数据传输模块、电机驱动模块、舵机驱动模块组成。其中摄像头组的路径检测模块由OV7620摄像头实现。
车速检测模块由编码器构成,实现速度的实时采集。电机驱动模块由八片IRF3205构成H桥来实现。电源模块由三块LM2940组成。舵机使用S-D5连接至PWM引脚,起跑线检测模块由两个TCRT5000以及一个LM339组成。无线数据传输通过NRF24L01进行数据传输。
智能车由路径传感器采集得到前方道路的图像,从中提取出有用信息,判断所处的跑道类型(直道,大弯道,S弯道),确定小车的舵机转向及车速。从而通过电机和舵机驱动小车流畅地在跑道上行进。系统框图如图1所示。
图1 总体结构框图
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章






