
资料下载


如何使用CMOS摄像头进行智能小车的的设计与实现
分享资料个
基于 Freescale 公司的 16 位 HCS12 单片机设计一种智能车系统。在该系统中,由 CMOS 摄像头实现路径识别,通过对小车的闭环控制,使小车能按照任意给定的黑色引导线平稳地寻迹。实验证明:系统能很好地满足智能车对路径识别性能和抗干扰能力的要求,舵机调节响应时间快,稳态误差小,具有较好的动态性能和良好的鲁棒性。
智能汽车是一种集环境感知、规划决策、自动行驶等功能于一体的综合系统,集中的运用到自动控制、模式识别、传感器技术、汽车电子、电气、计算机、机械等多个学科,是典型的高新技术综合体,具有重要的军用及民用价值。通常,智能车系统要求小车在白色背景的场地上,通过对转向角和车速的控制,使小车能自动地沿着一条任意给定的黑色带状引导线行驶。

本文基于低功耗 CMOS 摄像头设计了一种智能车,并完成了给定的任务要求。
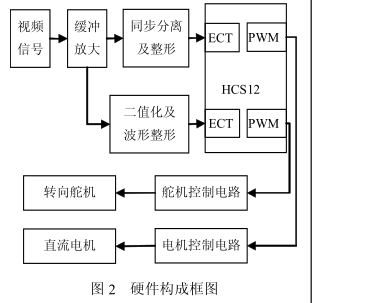
该系统主要由 HCS12 控制核心、电源管理模块、电机驱动模块、路径识别模块、转向舵机控制模块和速度检测模块组成,其结构框图如图 1 所示。
路径识别功能由面阵 CMOS 摄像头实现,将视频信号二值化为 128×64pix 的图像后送入微处理器进行处理。舵机控制采用非线性 P 算法进行调节,而车速控制采用的是 PID算法。软件设计中实时采集路况信息和实时速度,实现整个系统的闭环控制。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章






