
资料下载


×
基于滚动窗口的路径规划算法
消耗积分:1 |
格式:rar |
大小:3.74 MB |
2018-02-27
分享资料个
对于室内自主移动的智能机器人,通常需要事先对未知环境进行探测和地图构建。对于比较大的室内环境,手动控制机器人构建环境地图,具有浪费人力资源、构图时间长及效率低等缺点。因此,机器人如何以最优探测路径自主构建环境地图,具有重要的现实意义。
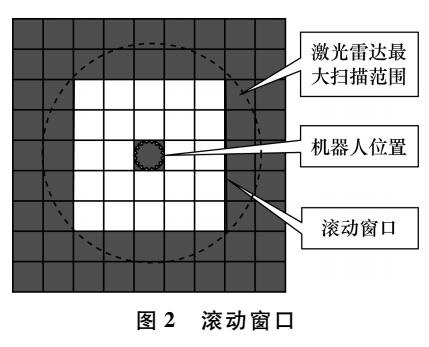
针对智能机器人如何以最优探测路线自主探测和构建室内环境地图的问题,提出一种基于滚动窗口的路径规划算法。将传统遍历构图的牛耕遍历方式改进为未知环境的探测策略,并结合滚动窗口实现对未知环境的滚动探测和构图路径规划,同时利用A‘算法规划滚动窗口中的局部路径和机器人进入死胡同的逃离路径。仿真结果表明,该算法可以有效减少构图节点,缩短构图路径,使机器人更快速、高效地自主构建环境地图。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




