

 机器人驱动部件如何选型?一文看懂!(电机、减速器)
机器人驱动部件如何选型?一文看懂!(电机、减速器)
电子说
描述
电子发烧友网报道(文/梁浩斌)人形机器人伴随AI技术的爆发,开始从实验室逐步迈入量产。Precedence Research预测,2032年全球人形机器人市场规模将超过2000亿元人民币,2022年到2032年市场规模复合年均增长率将达到33.3%。
从2024年开始,全球多家机器人公司推出全新的人形机器人硬件产品,AI大模型和强化学习技术的应用,则帮助人形机器人解决了运动算法的难题,解决了人形机器人运动稳定性问题后,自主AI能力的加入有机会真正实现“具身智能”。
那么对于现阶段还未实现“具身智能”的人形机器人来说,驱动机器人运动的部件是最核心的部分,下面我们简单剖析一下目前市场上主流的机器人驱动部件,了解不同部件的选型差异。
人形机器人驱动核心
根据目前现有的产品来看,按照动力来源的不同,驱动机器人运动的执行器可以主要分为液压和电机。在机器人研究初期也出现过一些气压驱动的机器人,气动在工业自动化中应用较多,但对于人形机器人来说,难以实现精准控制、驱动效率低,故逐渐被淘汰。
液压驱动机器人国内外都有研究,著名的波士顿动力的Atlas机器人就采用液压驱动,国内相关研究主要是大学实验室内开展的。另外近年还有波兰的Clone Robotics公司使用水和电力驱动,利用电水泵和微型阀门,向人造肌肉和血管系统以一定压力输送液体,驱动机器人肌肉系统运动。液压驱动结构简单,输出功率大,但相对维护和制造成本高,目前波士顿动力新一代 Atlas机器人已经从液压驱动转为电驱。
来源:长城证券
而电机能够实现精确的位置、速度和扭矩控制,这对于模仿人类复杂的关节运动和维持动态平衡至关重要。 与此同时电机的能量转换效率极高,且本身一些电机的功率密度也比较大,可以便于应用在人形机器人较小的结构空间内。成本方面,电机大规模量产的成本要相比其他驱动方式更低。总体来看电机更契合人形机器人对动态性能、可维护性及商业可行性的综合需求,因此成为目前人形机器人的主流驱动核心。
但电机直驱也难以满足机器人各种关节的扭矩需求,因此在实际的机器人应用中,驱动执行器除了电机外,还需要减速器、丝杠、编码器、力传感器等部件。
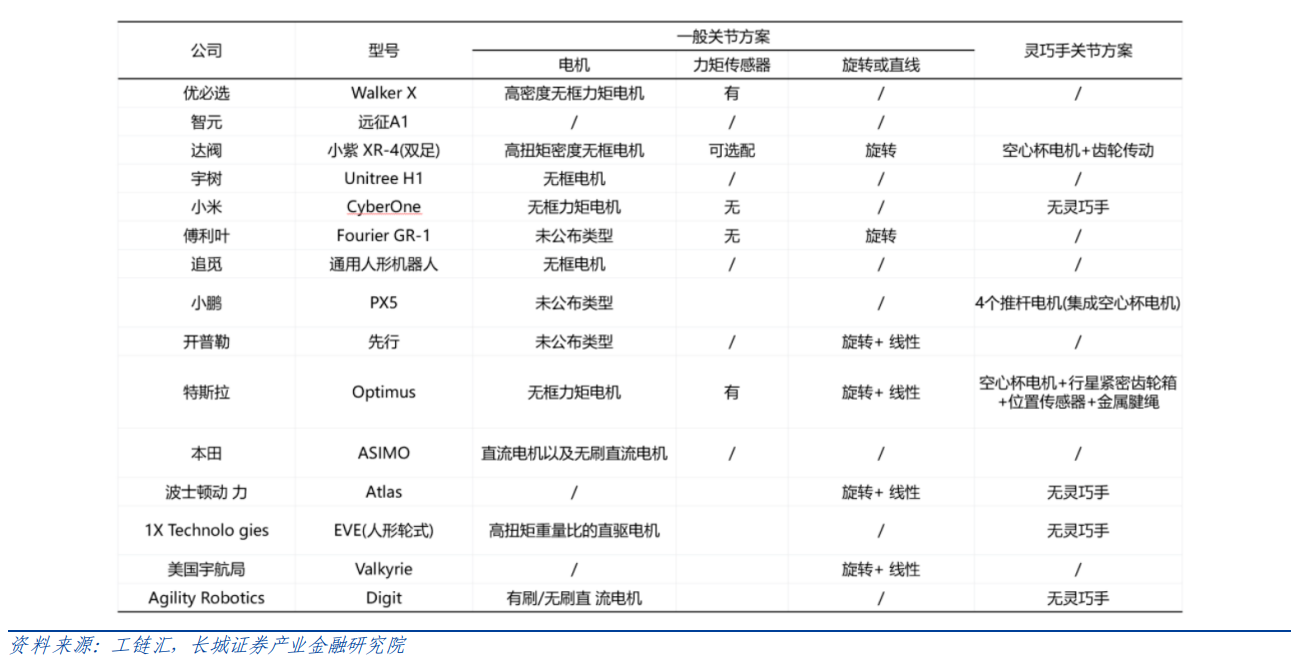
目前人形机器人上常用的电机可以分为力矩电机、空心杯电机、无框力矩电机、永磁同步电机这几种类型。
力矩电机:在结构上采用定子和转子轴向排列,体积较大但轴向尺寸紧凑;具备低速高扭输出能力,可以直接驱动,适合快速启停和精准控制。由于直驱的特性,力矩电机适合用于人形机器人的髋关节上。
无框力矩电机:相比力矩电机,无框力矩电机即简化了外壳结构,只提供定子和转子,电机需嵌入机器人机械结构中。一般需要与谐波减速器、编码器组合成紧凑关节模块。这种电机的优势在于扭矩密度高,散热也可以与机器人的结构共同优化,散热效率上限高,空间利用率高,同时保持高精度。在人形机器人中,无框力矩电机在灵巧手、膝关节等部分应用。
空心杯电机:转子采用空心杯形绕组,无铁芯的设计,重量极轻;转动惯量仅为传统电机的1/10,响应速度极快;无铁损,能量转换效率可达90%以上。总结就是有超轻量化,响应快,低噪音,无齿槽效应、效率高等优点,缺点则输出扭矩小,过载易烧毁,成本较高。因此空心杯电机适合一些小扭矩的场景,如医疗微型手术器械、昆虫仿生机器人等,在人形机器人上,灵巧手中也大量用到空心杯电机。
永磁同步电机:这是应用极为广泛的电机类型,新能源汽车、两轮电动车都有应用。主要的结构是嵌入永磁体的转子,以及三相绕组的定子,需要复杂算法对磁场进行定向控制。但优势明显,扭矩密度高、精度高、效率大于95%,在机器人领域,像工业机器人的机械臂、轮足机器人的轮毂驱动部分会使用到永磁同步电机。
减速器在机器人中,是连接电机和执行机构的关键部件,其核心作用是将电机的高速低扭矩输出转换为低速高扭矩输出,从而满足机器人关节对精准运动控制、高负载能力和稳定性的需求。减速器主要有四种类型:
谐波减速器:由波发生器、柔轮和刚轮组成,通过弹性变形传递运动,有高精度、高减速比、体积小、重量轻等优势;缺点是柔轮易疲劳,长期重载可能影响寿命。主要应用在小臂、腕部等关节。
RV(Rotary Vector旋转矢量)减速器:由两级减速(行星齿轮+摆线针轮)组成,具有高刚性、高扭矩、高精度的优势;缺点是体积较大。RV减速器主要应用在重型机器人的基座关节上,工业上应用较多。
行星减速器:由中心太阳轮、行星轮和外齿圈组成,多级齿轮啮合。具备中等的精度和负载能力,成本较低,结构紧凑;缺点是易磨损。适合中小型机器人使用,比如轻型的机械臂、服务型机器人等。
摆线针轮减速器(Cycloidal Drive):是利用摆线盘和针齿的啮合实现减速,具备高减速比、高扭矩密度、抗冲击性强的优势,但加工难度高,成本高。
-
一文看懂人形机器人成本占比最高的核心部件:减速器2025-01-07 4453
-
机器人产业链系列|减速器及国内外头部减速器企业梳理2023-11-30 3109
-
工业机器人的RV减速器和谐波减速器有什么区别?2023-10-10 3836
-
工业机器人的Rv减速器和谐波减速器有什么区别2022-04-06 3894
-
为什么工业机器人还需要减速器呢2021-09-03 3070
-
机器人关节用什么电机2021-05-28 2039
-
机器人关节用什么电机?2021-05-27 4263
-
机器人技术:RV 减速器和谐波减速器2021-03-22 11601
-
桁架机器人核心配件介绍2018-11-22 3455
-
减速机在工业机器人的应用2018-09-18 3842
-
工业机器人的Rv减速器和谐波减速器对比分析2018-04-15 101980
-
工业机器人核心零部件市场分析2018-03-21 3624
-
工业机器人减速器概述2017-10-09 7726
-
工业机器人的四大核心部件2015-02-12 20733
全部0条评论

快来发表一下你的评论吧 !
