

HJ4205步进电机驱动电路详解
描述
一、 概 述
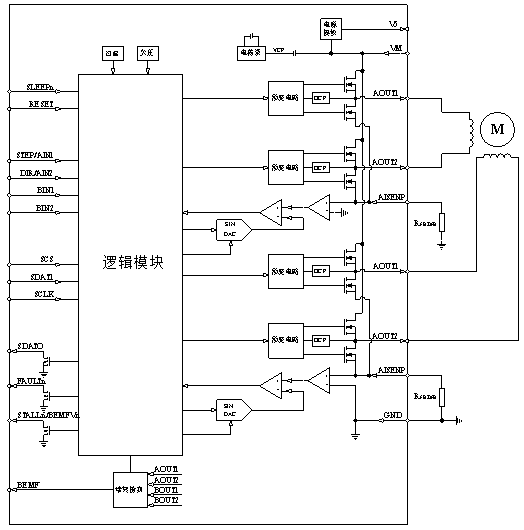
HJ4205是一款步进电机驱动电路。包含一个步进电机控制器和内部N沟道MOSFET,来驱动一个双极步进电机或两个刷式直流电机。HJ4205支持全步进到1/256步进驱动模式。通过使用自适应消隐时间和包括自动混合衰减模式在内的多种不同的电流衰减模式,可实现非常平滑的运动过程。
电机运动采用标准的DIR/STEP控制方法。器件运行通过一个SPI串行接口控制。输出电流(扭矩)、步进模式、衰减模式和堵转检测功能都可以通过SPI串行接口进行编程。
二、电原理图
三、封装形式及引出端功能
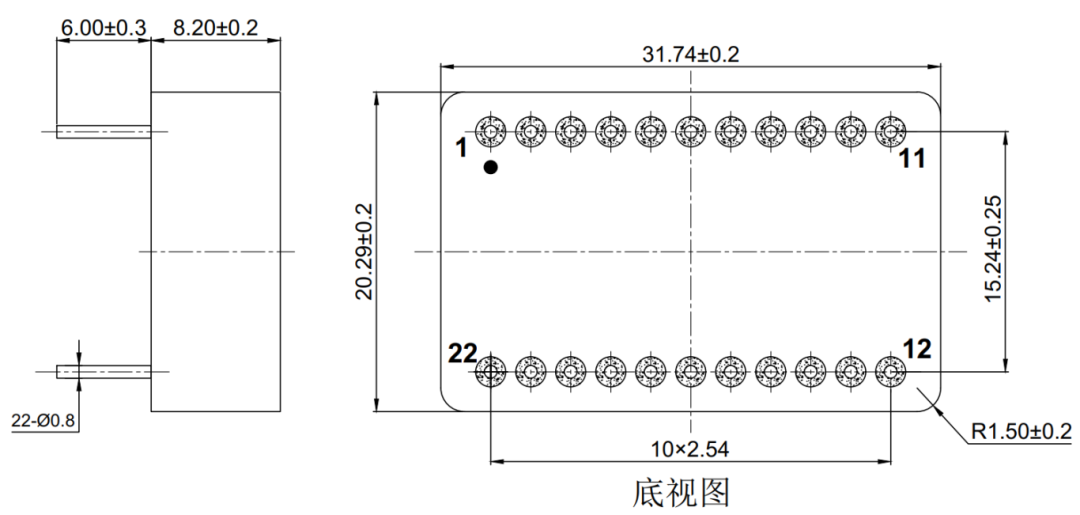
2.1封装形式
采用BOX3220-22P全密封金属直插封装(选型HJ4205),下图是封装尺寸图。
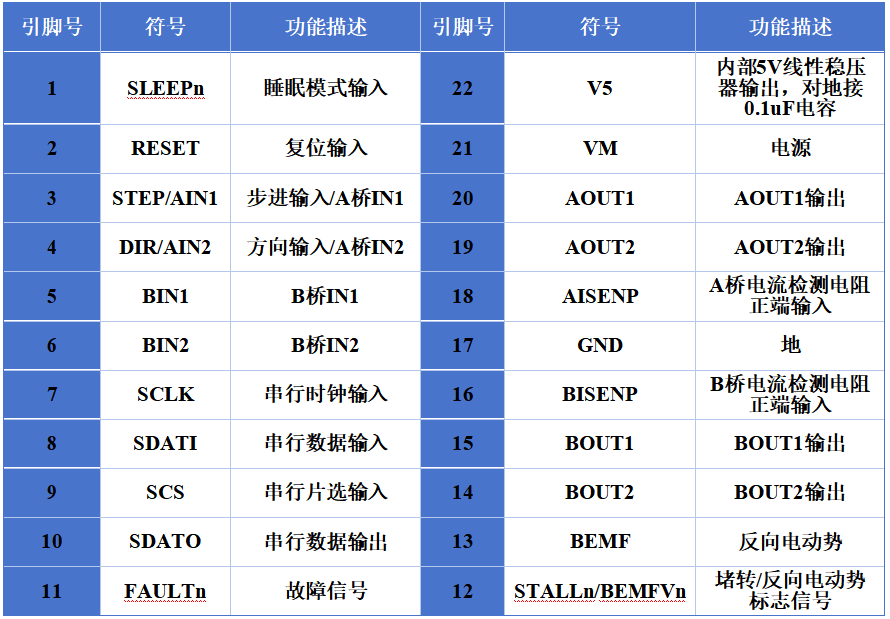
2.2.引出端功能
四、 绝对最大额定值

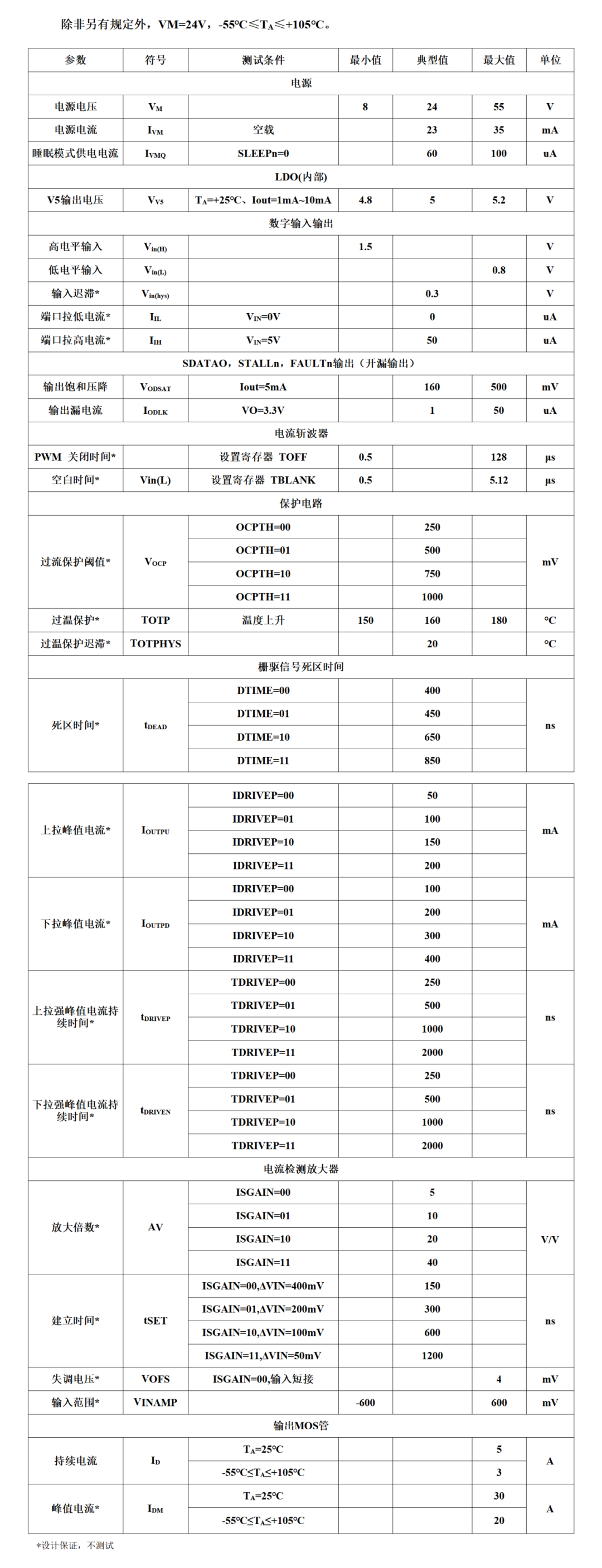
五、电特性
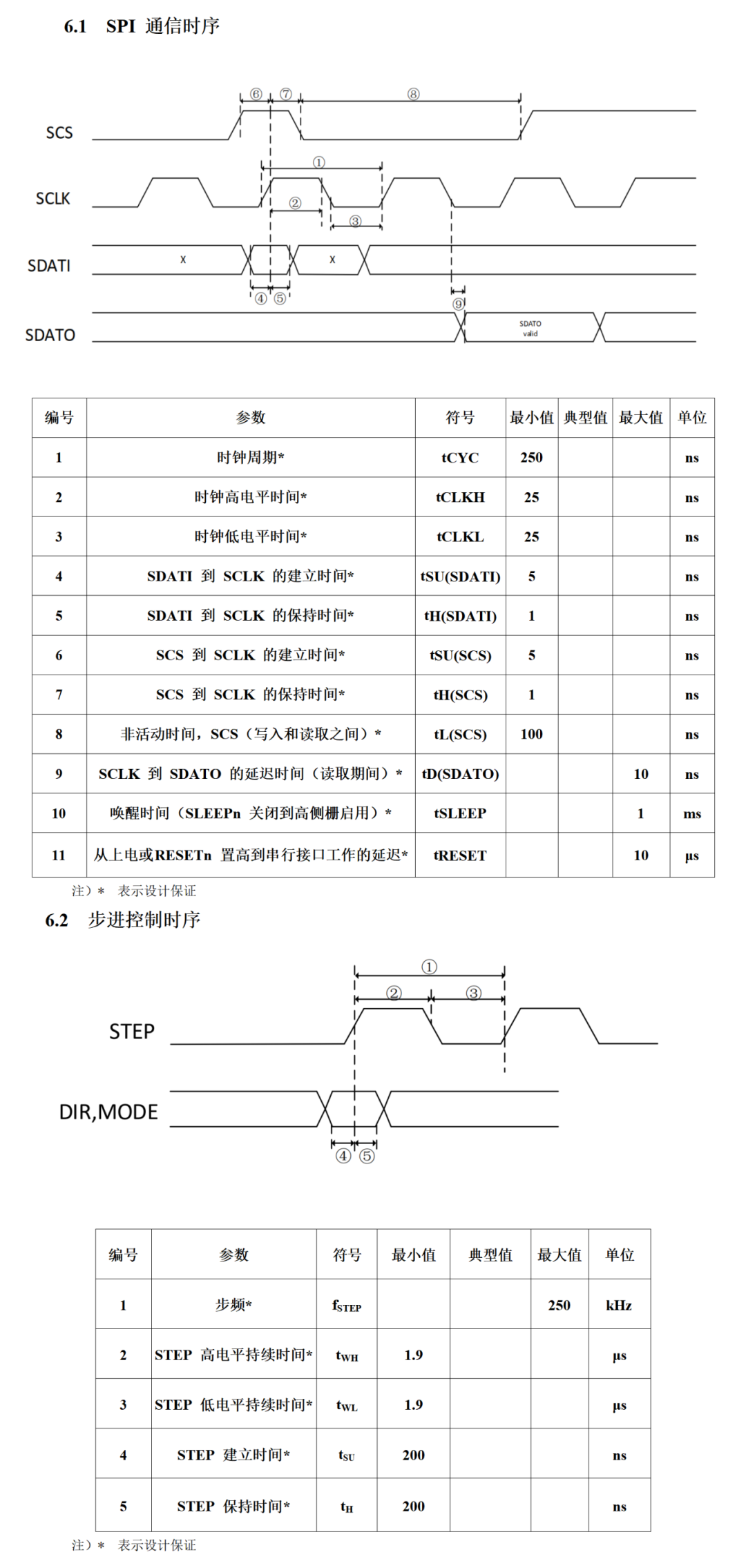
六、 逻辑时序图
七、 功能描述
7.1 复位
芯片内部有用于监测VM引脚电压的上电复位电路。如果 VM 电压低于 UVLO 电压,则器件复位。如果 RESET 引脚置高电平,所有内部逻辑都将被复位,且功率部分将被禁用,包括步进和串行接口的所有输入都将被忽略。
在退出 RESET 态时(置低电平),需要经过一段时间(大约 1 ms)才能使芯片恢复工作。
7.2 低功耗模式
将 SLEEPn 引脚置低电平,使设备进入低功耗状态。在休眠模式下,电机驱动电路被禁用,栅极驱动调节器和电荷泵被禁用,所有模拟电路被置于低功率状态。但设备中的数字电路仍在工作,因此仍然可以通过串行接口访问设备寄存器。
当 SLEEPn 生效时,RESET 引脚不起作用。在 RESET 生效之前,必须退出低功耗模式。当退出低功耗模式时,需要经过一段时间(大约 1ms)才能应用 STEP 输入。
7.3 直接 PWM 输入模式
通过在 0x2 寄存器中设置 PWMMODE 位,开启直接 PWM 模式,用 PWM_MODESEL 来选择输入模式逻辑。在直接 PWM 输入模式下,AIN1、AIN2、BIN1 和 BIN2 直接控制输出驱动器的状态,这样可以驱动最多两个有刷直流电机。
PWM_MODESEL = 2’b00 时,xIN1 和 xIN2 为常见的 IN1,IN2 控制逻辑,逻辑如下表:
| xIN1 | xIN2 | xOUT1 | xOUT2 |
| 0 | 0 | Z | Z |
| 0 | 1 | L | H |
| 1 | 0 | H | L |
| 1 | 1 | L | L |
PWM_MODESEL = 2’b01 时,xIN1 为使能控制 xEN,xIN2 为方向控制 xPH,xIN1=0 时,输出高阻态,逻辑如下表:
| xIN1 | xIN2 | xOUT1 | xOUT2 |
| 0 | 0 | Z | Z |
| 0 | 1 | Z | Z |
| 1 | 0 | L | H |
| 1 | 1 | H | L |
PWM_MODESEL = 2’b10 时,xIN1 为使能控制 xEN,xIN2 为方向控制 xPH,xIN1=0 时,输出刹车态,逻辑如下表:
| xIN1 | xIN2 | xOUT1 | xOUT2 |
| 0 | 0 | L | L |
| 0 | 1 | L | L |
| 1 | 0 | L | H |
| 1 | 1 | H | L |
PWM_MODESEL = 2’b11 时,xIN1 为使能控制 xEN,xIN2 为方向控制 xPH,逻辑如下表:
| xIN1 | xIN2 | xOUT1 | xOUT2 |
| 0 | 0 | Z | Z |
| 0 | 1 | L | L |
| 1 | 0 | L | H |
| 1 | 1 | H | L |
如果在直接 PMW 模式下使用混合或自动混合衰减模式,它们将应用于每个周期,因为电流变化信息不可用。
在直接PWM模式下,电流控制电路(Torque)处于开启状态,仍可用 TORGUE 寄存器缩放电流,仍可使用0x1寄存器的ISGAIN位来设置ISEN检测放大器增益。
通过电机绕组的电流由可编程固定关断时间的PWM电流调节电路进行调节。当H桥被启用时,绕组电流以一定速率上升,此速率取决于绕组的直流电压、电感以及反电动势的大小,一旦电流达到电流斩波阈值,电桥会在固定的时间段内禁用电流,该时间段可通过写入关寄存器中的TOFF位在500ns 和 128μs之间进行编程。关闭时间到达后,电桥重新启用,开始另一个PWM周期。
斩波电流由比较器设置,比较器将电流检测电阻器的电压与参考电压进行比较,电流检测电阻器连接到 xISENx引脚,且其电压由电流检测放大器进行放大,电流检测放大器可在控制寄存器中编程。在 PWM 模式下驱动时,斩波电流计算如下:
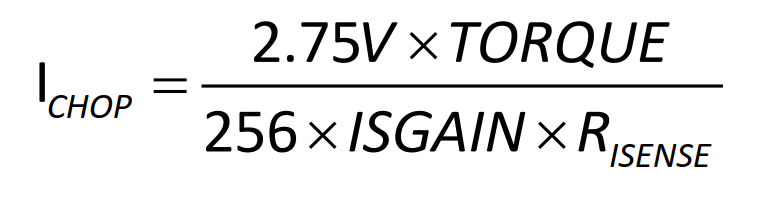
满标度VREF设置为2.75V。其中TORQUE 是转矩位的设置,ISGAIN是ISENSE放大器(5x、10x、20x或40x)的可编程增益。
7.4 微步控制 STEP/DIR 输入控制模式
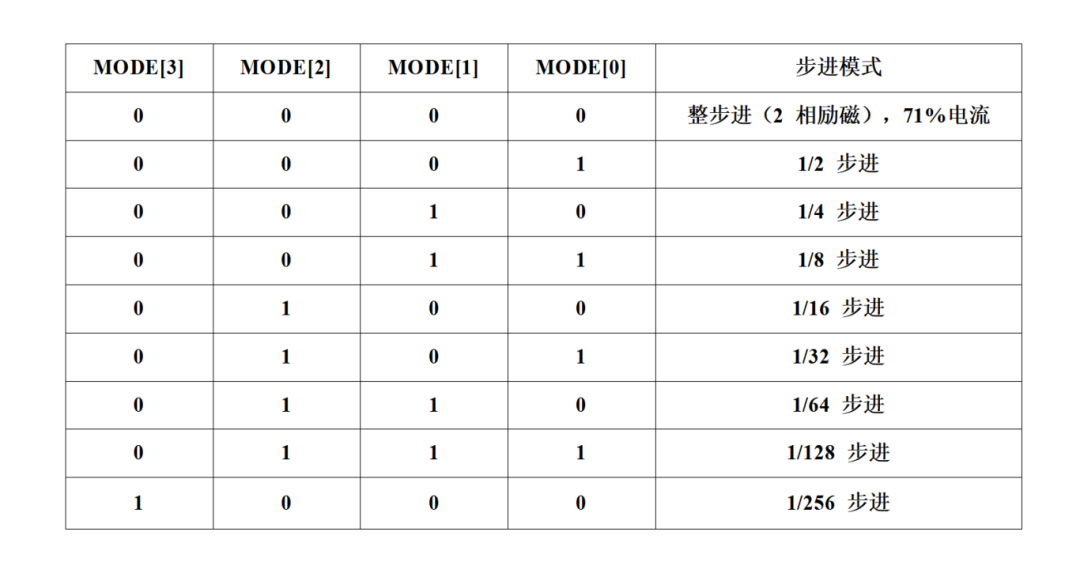
HJ4205中的内置分度器逻辑允许多种不同的步进配置。0x0寄存器中的MODE 位用于配置步进细分,逻辑如下:
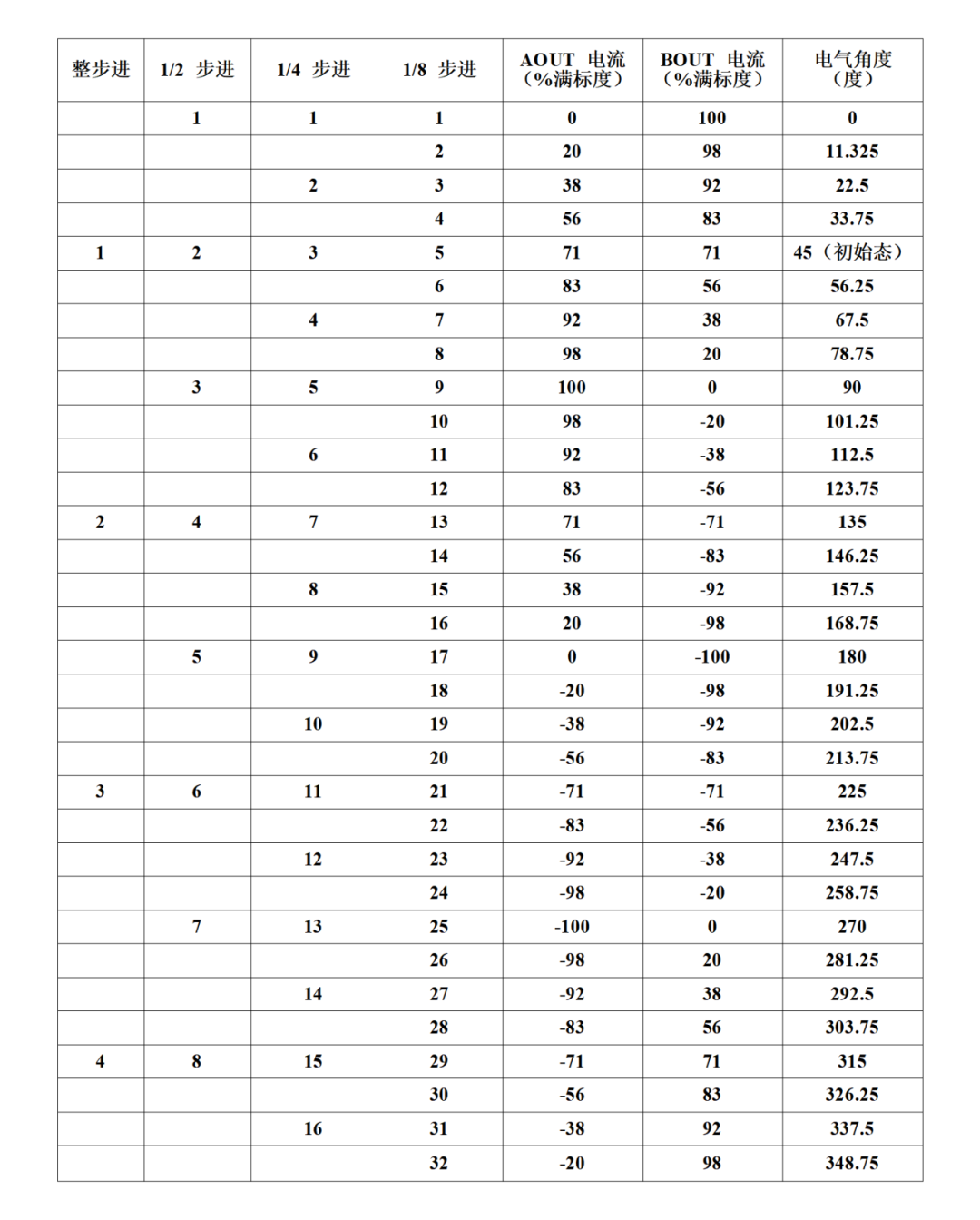
下表显示了整步进到 1/8步进模式的相对电流和步进方向。更高的微步分辨率遵循相同的模式。
AOUT电流是电气角度的正弦;BOUT 电流是电气角度的余弦。复位的状态为 45°位置,此状态在上电或使用 RESETn 时进入。
在 STEP 输入的每个上升沿,或每次在向 0x0 寄存器中的 RSTEP 位写入‘1’后,分度计将进入下一个状态。DIR引脚接高且 RDIR(0x0 地址)置0,或DIR引脚接低且RDIR置‘1’,为正转。DIR 引脚接低且RDIR 置0,或 DIR引脚接高且 RDIR 置‘1’,则反转。正电流定义为xOUT1为正,相对的 xOUT2 为负。
如果在步进过程中改变了步进细分,分度计将在下一个步进的上升沿变为新细分的下一个有效状态。
八、典型应用
HJ4205步进电机驱动电路典型应用电路。
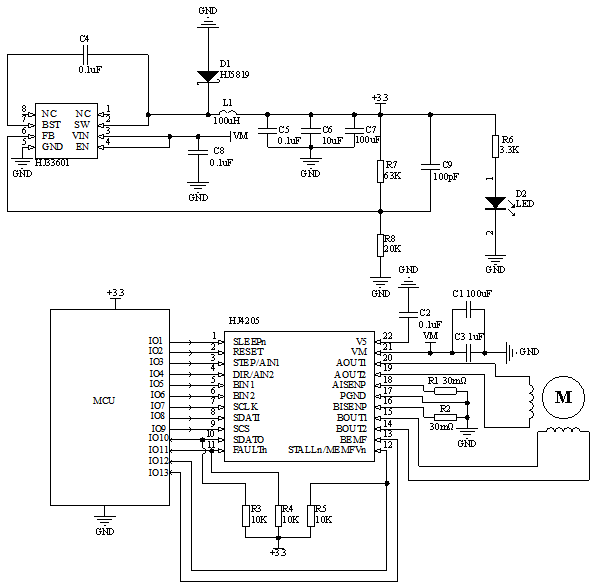
典型应用图
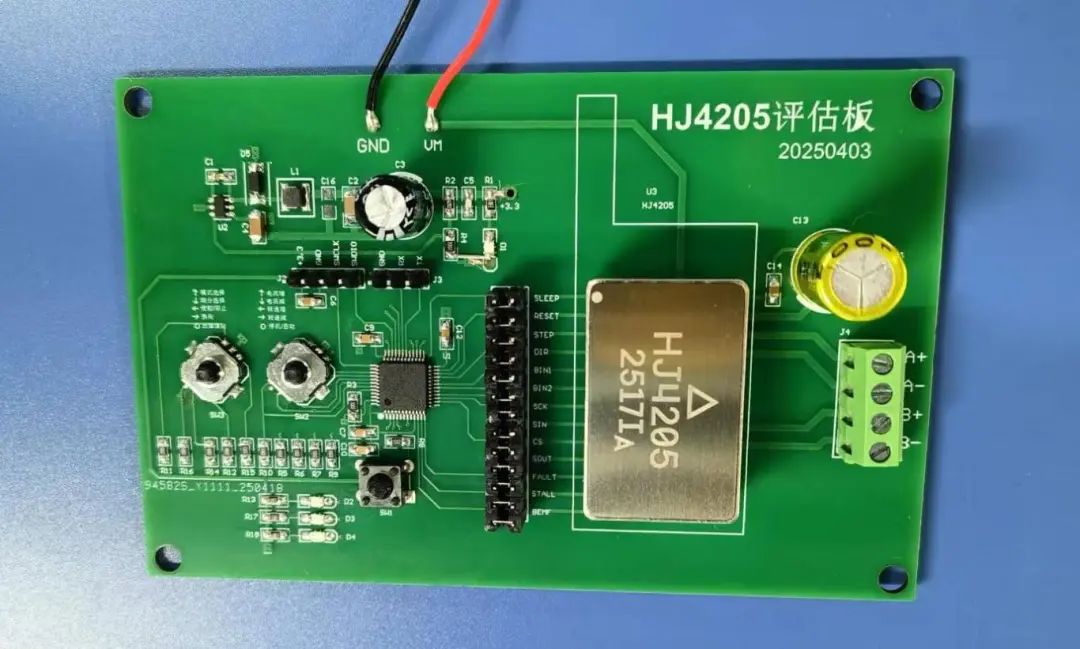
评估板实物图
-
SGM42630步进电机驱动芯片:设计与应用详解2026-03-25 739
-
DRV8825步进电机控制器IC:设计与应用详解2026-01-11 1791
-
STM32驱动28BYJ-48步进电机2023-03-21 1349
-
Arduino CNC电机扩展板详解(A4988驱动42步进电机)2023-03-20 1586
-
A4988步进电机驱动器是如何工作的?2023-03-10 1776
-
如何测试TB6600步进电机驱动器控制器和步进电机2022-12-06 1519
-
使用Arduino和A4988步进驱动器模块控制NEMA 17步进电机 相关资料分享2021-07-08 1163
-
IHM01A1步进电机驱动板的电路原理图免费下载2020-03-09 1738
-
C060214步进电机驱动器2016-04-25 843
-
35步进电机驱动问题2014-03-20 4429
-
ULN2003步进电机驱动电路2013-09-05 14703
-
ULN2003步进电机驱动原理及应用程序步进电机驱动原理及应用2013-07-10 28778
-
LT2221步进电机驱动电路2011-11-28 5200
-
L297步进电机控制电路2008-08-26 4689
全部0条评论

快来发表一下你的评论吧 !
