

UCC27624-Q1 具有 4V UVLO、30V VDD 和低传播延迟的汽车级 5A/5A 双通道栅极驱动器数据手册
描述
UCC27624-Q1 是一款双通道、高速、低侧栅极驱动器,可有效驱动 MOSFET、IGBT、SiC 和 GaN 功率开关。UCC27624-Q1 的典型峰值驱动强度为 5A,可缩短电源开关的上升和下降时间,降低开关损耗并提高效率。该器件的快速传播延迟(典型值为 17ns)通过改善系统的死区时间优化、脉冲宽度利用率、控制环路响应和瞬态性能,产生更好的功率级效率。
*附件:ucc27624-q1.pdf
UCC27624-Q1 的输入端可以处理 –10V,这提高了具有中等接地反弹的系统的稳健性。输入与电源电压无关,可以连接到大多数控制器输出,以实现最大的控制灵活性。独立的使能信号允许独立于主控制逻辑控制功率级。在系统故障的情况下,栅极驱动器可以通过将使能拉低来快速关断。许多高频开关电源在功率器件的栅极处会出现噪声,这些噪声可能会注入栅极驱动器的输出引脚,并可能导致驱动器发生故障。该器件的瞬态反向电流和反向电压能力使其能够容忍功率器件或脉冲变压器栅极上的噪声,并避免驱动器故障。
UCC27624-Q1 还具有欠压锁定 (UVLO) 功能,以提高系统稳健性。当没有足够的偏置电压来完全增强功率器件时,栅极驱动器输出由强大的内部下拉 MOSFET 保持低电平。
特性
- 适用于汽车应用
- 符合 AEC-Q100 标准
- 设备温度 1 级
- 器件 HBM ESD 分类等级 H1C
- 器件 CDM ESD 分类等级 C6
- 每个通道的典型峰值 5A 拉电流和灌电流驱动电流
- 能够处理 –10V 的输入和使能引脚
- 输出能够处理 –2V 瞬变
- 绝对最大 VDD 电压:30V
- 具有 UVLO 的 4.5V 至 26V 宽 VDD 工作范围
- 具有高抗噪能力的迟滞逻辑阈值
- VDD 独立输入阈值(TTL 兼容)
- 快速传播延迟(典型值为 17ns)
- 快速上升和下降时间(典型值为 6ns 和 10ns)
- 两个通道之间的 1ns 典型延迟匹配
- 两个通道可以并联以获得更高的驱动电流
- SOIC8 和 VSSOP8 PowerPAD™ 封装选项
- 工作结温范围为 –40°C 至 150°C
参数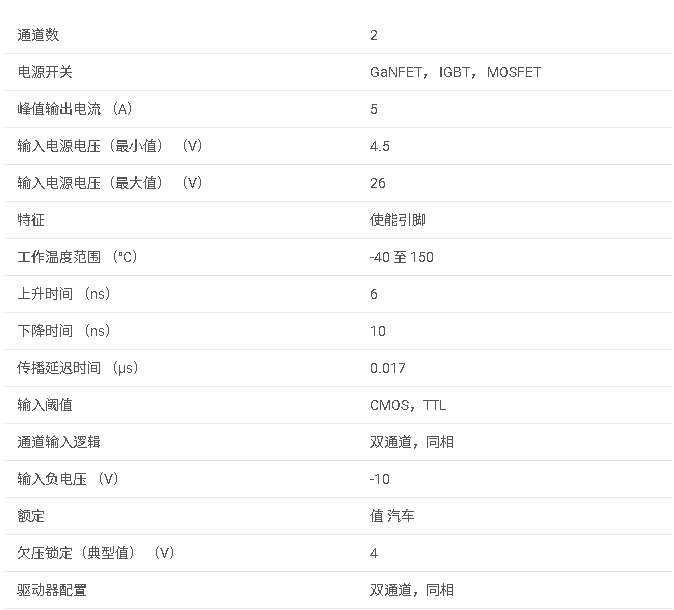
方框图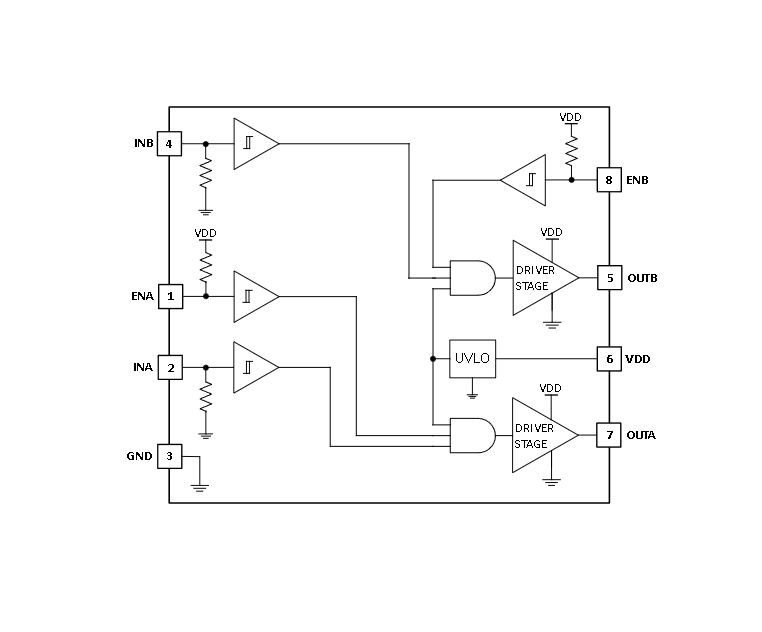
一、产品概述
UCC4-Q 是一款专为汽车电子应用设计的双通道、低侧栅极驱动器,支持高达 A 的峰值源和沉电流,具有 -V 输入能力。该驱动器适用于汽车 DC/DC 转换器、开关电源(SMPS)、功率因数校正(PFC)电路、DC/DC 转换器、电机驱动和太阳能电源供应等应用。
二、主要特性
- 高电流驱动能力:每个通道提供典型 A 的峰值源和沉电流。
- 宽输入电压范围:VDD 工作电压范围从 4.5V 至 V,具有欠压锁定(UVLO)功能。
- 低噪声免疫性:具有迟滞逻辑阈值,适用于高噪声环境。
- 快速响应:快速传播延迟(典型值为 7ns)和快速的上升/下降时间(典型值分别为 6ns 和 ns)。
- 通道延迟匹配:两个通道之间的延迟匹配典型值为 ns。
- 高鲁棒性:输入和使能引脚能够承受 -0V 电压,输出能够承受 -V 瞬态电压。
- 多种封装选项:提供 SOIC8 和 VSSOP8 PowerPAD™ 封装选项。
三、应用领域
- 汽车 DC/DC 转换器
- 开关电源(SMPS)
- 功率因数校正(PFC)电路
- DC/DC 转换器
- 电机驱动
- 太阳能电源供应
- 脉冲变压器驱动器
四、功能描述
1. 输入与使能功能
- 输入阈值:TTL 兼容,输入阈值独立于 VDD 供电电压。
- 使能引脚:每个通道具有独立的使能引脚(ENA 和 ENB),低电平有效,内部上拉电阻确保默认使能状态。
2. 输出功能
- 高电流驱动:每个输出通道能够提供高达 A 的峰值源和沉电流。
- 低电压摆幅:输出摆幅从 VDD 到 GND,提供轨到轨操作。
- 反向电流能力:输出能够承受高达 A 的反向电流瞬态,避免驱动器损坏。
3. 保护功能
- 欠压锁定(UVLO) :当 VDD 电压低于设定阈值时,输出被强制拉低,确保系统可靠性。
- 输出短路保护:内部集成短路保护机制,防止输出短路导致的损坏。
五、典型应用
文档提供了 UCC-Q1 在汽车 DC/DC 转换器中的典型应用电路,包括设计要求和详细设计步骤,如 VDD 电源设计、输入滤波、栅极电阻选择等。
六、电源推荐
- VDD 供电电压:推荐工作电压范围为 .V 至 6V,注意避免超过绝对最大电压值 0V。
- 旁路电容:建议在 VDD 引脚附近放置至少 μF 和 0.1μF 的陶瓷旁路电容,以减小电源噪声。
七、布局指南
- 最小化寄生电感:驱动器应尽可能靠近被驱动的功率器件,以减小寄生电感。
- 电源旁路:确保 VDD 旁路电容尽可能靠近驱动器引脚,以提供稳定的电源供应。
- 信号完整性:保持输入和使能信号的完整性,避免长距离传输和干扰。
- 热管理:考虑 PCB 布局以优化热传导,确保驱动器在允许的工作温度范围内运行。
-
SiLM27624LCA-DG双通道门极驱动器30V/5A高速低边驱动,支持GaN/IGBT应用2026-03-09 147
-
汽车应用利器:UCC27624V-Q1低侧栅极驱动器深度剖析2026-01-06 517
-
UCC27624双通道低侧栅极驱动器技术解析2025-09-18 1238
-
UCC27524A-Q1 具有 5V UVLO 和负输入电压处理能力的汽车类 5A/5A 双通道栅极驱动器数据手册2025-05-20 1151
-
UCC27524A1-Q1 具有 5V UVLO 和负输入电压处理能力的汽车类 5A/5A 双通道栅极驱动器数据手册2025-05-19 1028
-
UCC27624 具有 4V UVLO、30V VDD 和低传播延迟的 5A/5A 双通道栅极驱动器数据手册2025-05-16 1119
-
具有-10V输入能力的30V、5A、双通道、低侧栅极驱动器UCC27624数据表2024-04-03 637
-
具有-10V输入能力、适用于汽车应用的30V、5A、双通道、低侧栅极驱动器UCC27624-Q1数据表2024-03-25 585
-
数明半导体新推双通道30V, 5A/5A的高速低边门极驱动器2023-05-17 1483
全部0条评论

快来发表一下你的评论吧 !
