

BLDC无位置传感器控制方式介绍
描述
本期速览
在第四季 第九话“常用的电机分类以及控制方法”的小课堂结尾,我们给大家留了个新的问题:
BLDC根据转子的位置进行换向控制,而转子位置要靠位置传感器获取,那么这期就为大家介绍BLDC的无位置传感器控制方式。
01为什么需要无位置传感器控制?
在工业生产中,我们会根据应用场景的不同,选择合适的转子位置传感器。对于高精度的伺服应用,比如工业机械手臂,需要采用高分辨率的光电编码器,或者由检测磁场变化的磁编码器,而对于要求较低的应用,比如工业风扇,考虑到传感器的成本,一般采用霍尔位置传感器就足够了。
图1:不同应用场景适合的位置传感器
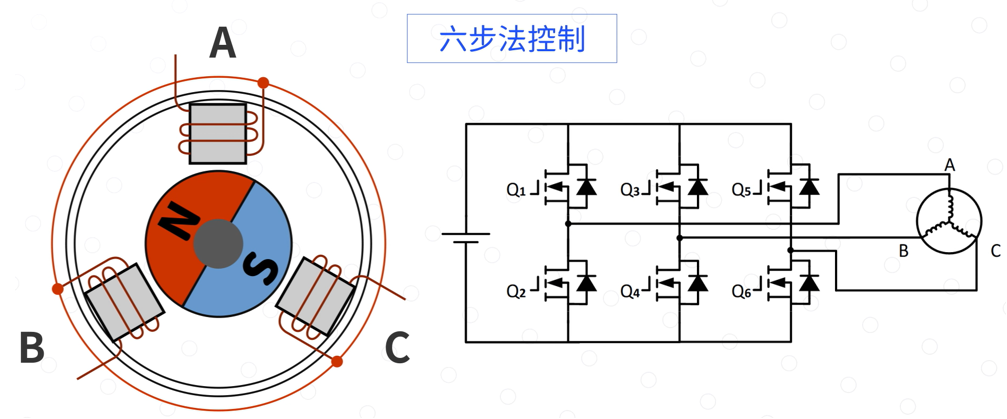
霍尔位置传感器的尺寸小,价格廉宜,操作稳定而且安装方便,利用霍尔传感器在一个电气周期内提供的六个转子位置,作为换相信号,控制MOSFET管的通断,就可以实现之前视频提到的六步法转BLDC。
但位置传感器的存在会增加电机的体积和成本,限制系统的尺寸,在恶劣的工况下,位置传感器有失效风险,会降低系统可靠性。
既然位置传感器应用有限,那是不是能够用其他位置检测的方式代替,进一步拓展无刷直流电机的应用场合呢?
就这样,无位置传感器控制应运而生!!
02 3 大核心控制算法拆解
无位置传感器控制的核心就是转子位置估算策略,目前常用的BLDC无位置传感器控制算法主要分为以下三种:
第一种常见的就是反电动势过零检测法,由方波驱动的BLDC在电机旋转时,由于对转子磁场磁感线的切割作用,定子绕组内会形成反电动势(Back Electromotive Force,BEMF)
由相反电动势过零点和电机换相点的位置关系可以看出,相反电势的过零点再延迟30°电角度就是电机的换相点S,所以只要检测到相反电动势的过零点,便可以得到6个离散的转子位置信号。
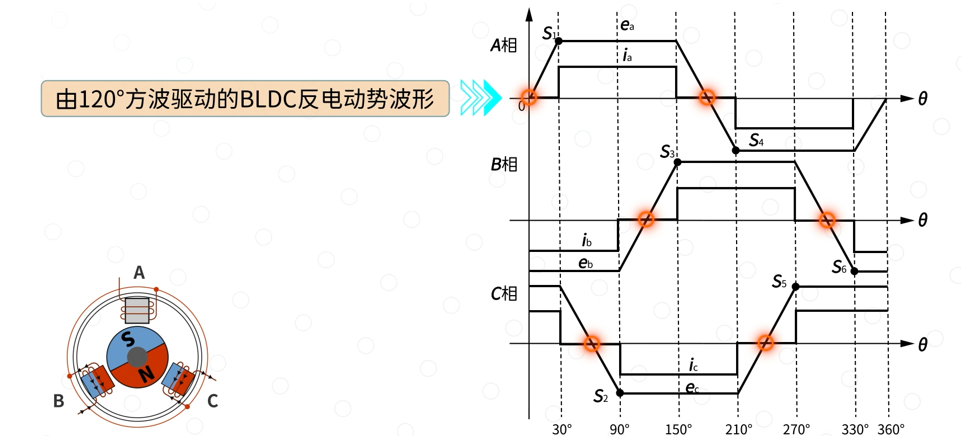
图2:反电动势过零检测法方波示意图
反电动势法原理简单,易于实现,但是在静止和低速状态下存在反电动势难以测量、实际反电动势波形不理想和高频信号干扰等问题,需要设计合适的检测电路和控制策略来获取电机绕组的反电动势信号。
第二种常见的无位置控制算法就是磁链法,它主要通过检测BLDC定子绕组中的电流和电压信号计算磁链,再根据磁链与转子位置关系间接得到电机的转子位置。
由电机学知识可以知道,这是定子相绕组的磁链ψ与转子位置关系θ公式:

而电机的反电动势与永磁磁链也有关系:
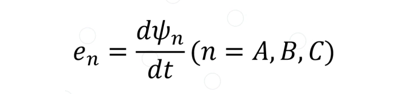
通过这些公式可以得到两相绕组的磁链之差与电机换相点之间的关系,我们以A相为例,检测到B、C两相绕组的磁链之差的过零点延迟30°电角度就是电机A相的换相点。
图3:磁链法方波示意图
磁链法也是间接计算转子位置,但是磁链幅値不受电机转速影响,因此适用于整个速度范围,具有更强的适应性,但还是需要靠其他方式起动电机,而且计算结果易受电机参数变化的影响,应用同样受到限制。
第三种常见控制是采用状态观测器法检测转子位置,它的基本控制思路就是以定子电流 (iA IB IC)、母线电压(Udc)、电机参数 (定子电阻、定子电感。。) 等为状态变量,在电机数学模型的基础上,建立转子位置的观测模型。
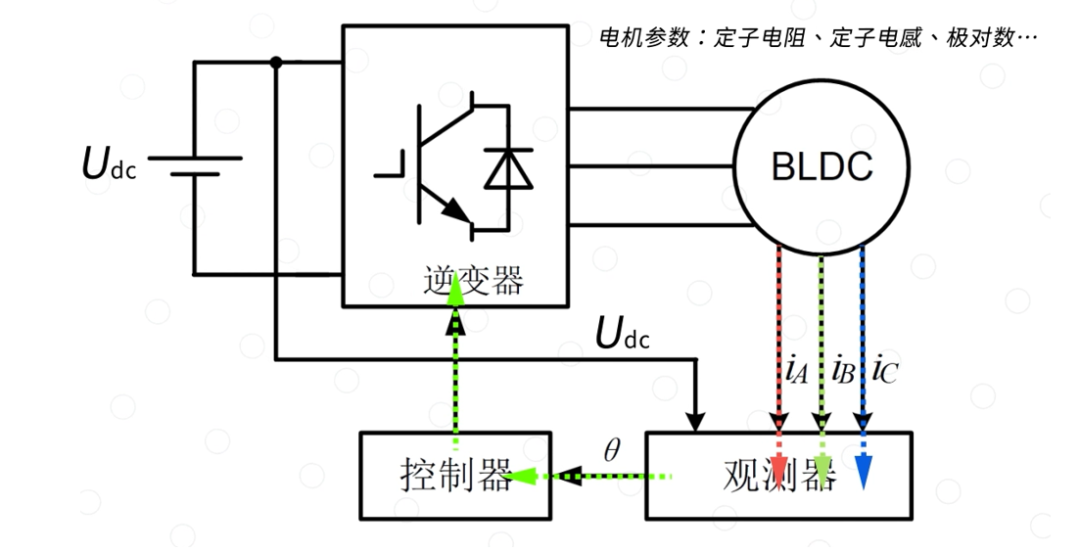
图4:观测模型示意图
常见的方式是反电动势或磁链观测器,通过提取反电动势或磁链中包含连续转速或位置信息 ,实现BLDC的无位置控制,但是在零速、低速范围内稳定性较差,还有可能完全失效。
实际应用中,可以用卡尔曼滤波器、滑模观测器、自适应观测器改变算法结构,实现更加有效的转子位置检测。
状态观测器法抗干扰能力强,在高速、重载等情况下控制效果也较好,并且能够检测到任意时刻的转子位置信息,但是由于状态观测器法需要不断地计算系统状态变量,所以要求控制芯片有较高的运算速度。
03MPS 最新方案:MP6636 专用芯片
在BLDC无位置控制中,将无位置控制技术集成化、芯片化成为新的趋势,MPS最新推出针对三相BLDC无位置传感器控制的专用芯片——MP6636。
相比于反电势过零检测得到六个离散的转子位置信号,MP6636能够检测任意时刻的转子位置信号,采用FOC控制,保证电机在转动过程中力矩始终恒定,相比于6步换向控制,电机运转更平稳。
图5:三相BLDC无位置传感器控制芯片MP6636
-
将无传感器BLDC电机控制引入低成本应用2018-11-08 2422
-
L78/G1F 无传感器BLDC电机 初始转子位置检测2019-05-21 4273
-
关于BLDC电机控制的所有信息:无传感器无刷直流电机控制器2019-10-25 5408
-
基于PSoC4的无传感器BLDC控制2020-05-05 1596
-
无位置传感器的电机控制方式2021-06-29 1640
-
一种大电流无传感器BLDC电机控制器电路2023-09-14 1587
-
无传感器的BLDC电机控制2009-09-19 883
-
用dsPIC30F2010控制无传感器BLDC电机,AN992010-03-04 1060
-
用dsPIC30F2010控制无传感器的BLDC电机 AN92010-03-18 1025
-
无位置传感器无刷直流电机的简易控制2017-07-20 1431
-
关于BLDC无传感器风扇解决方案的介绍2018-07-20 5137
-
简单介绍一下常用的几种无位置传感器的控制方式2020-08-05 7073
-
BLDC电机的无传感器梯形控制2024-10-12 604
-
BLDC无位置传感器控制的关键技术问题剖析(可下载)2025-04-08 920
-
HPM知识库 | BLDC 无传感器过零控制技术指南2026-03-27 7928
全部0条评论

快来发表一下你的评论吧 !
