
资料下载


如何使用单片机AT89C51和接口技术进行汽车倒车雷达系统的设计
分享资料个
现如今随着人们生活水平的提高,汽车已成为了人们出行的首选交通工具,据统计每年我国乃至全世界的汽车数量都在大幅增长,这很大程度上提高了人们的生活水平,促进了汽车产业的发展。但另一方面,由此引发的交通事故也越来越频繁,特别是汽车倒车时由于其可视性不足造成的生命财产损失更严重。所以近年来研究汽车倒车雷达系统成为了一大热门课题。
倒车雷达又称为泊车辅助系统,是车辆泊车时的安全辅助装置。倒车雷达系统能够在泊车时以声音和指示图形或视频影像等方式向驾驶员反映车辆后方的环境状况,解除视觉死角中的潜在威胁,提高车辆泊车的安全性。目前倒车雷达的应用十分广泛,绝大多数车辆都已经将倒车雷达作为必不可少的标准配件。
倒车雷达的运用可极大地减轻驾驶者的体力和脑力劳动强度,降低倒车难度,避免因驾驶员因方向感不强或判断和操作失误而引起的事故,同时它将对最终实现无人驾驶产生积极的意义。
汽车倒车雷达是为了避免汽车倒车过程中发生碰撞,设计一种基于单片机AT89C51的倒车雷达系统,介绍了超声波测距的基本原理,阐述了系统的结构组成、硬件电路设计及软件设计。倒车距离用LED数码管实时显示,为倒车的安全性,设计了报警电路,当测出汽车尾部距离障碍物的距离小于一定值时,系统会报警,提示司机注意安全。经验证,该系统在10—500CM时具有很高的精度,且该系统结构简单,可靠性极高,实用性也很强等优点。
超声波模块分机械方式和电气方式两类,它实际上是一种换能器,在发射端它把电能或机械能转换成声能,接收端则反之。本次设计超声传感器采用电气方式中的压电式超声波换能器,它是利用压电晶体的谐振来工作的。它有两个压电晶片和一个共振板。当它的两极外加脉冲信号,其频率等于压电晶片的固有振荡频率时,压电晶片将会发生共振,并带动共振板振动,产生超声波。
发射器发出的超声波以速度v 在空气中传播,在到达被测物体时被反射返回,由接收器接收,其往返时间为t.由公式:测出的距离 L (m) = 常温下的声速340 (m/s)× 感应时间t (s) / 2,算出被测物体的距离。
通过单片机P2.0口控制超声波的发射,同时打开定时器,定时器开始计时。超声波接收器接收到信号经过放滤波后返回给单片机P3.2口,触发单片机外部中断0,通过程序取出此刻定时器的数值即为超声波在空中的传输时间。
目前倒车雷达系统大多采用超声波测距原理,通过超声波测距装置测取车辆后方的障碍物距离,以此为依据来判断泊车环境。超声波测距具有能量消耗缓慢和传播距离远的优点,且不易受光线,烟雾和电磁等干扰的影响,可以再各类天气下使用。并且利用超声波测距原理简单,易于实现,成本低廉,可靠性也好,因而广泛应用于各类倒车雷达中。
硬件电路的设计主要包括单片机系统及显示电路、超声波发射电路和超声波检测接收电
路三部分。单片机采用STC89C51 或其兼容系列。采用12 MHz 高准确度的晶振,以获得较稳定时钟频率,减小测量误差。单片机用P2.4 端口输出超声波换能器所需的40 kHz 的方波信号,利用外中断0 口监测超声波接收电路输出的返回信号。
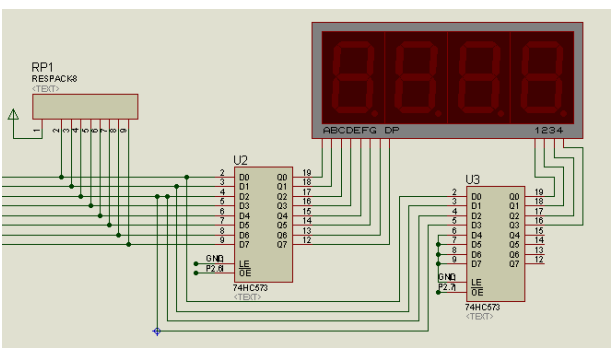
显示电路:通过四位数码管来显示当前测出的距离,可以精确到毫米。为节省单片机宝贵的IO资源,显示电路共用P0口,所以应用锁存器来锁存数码管段选和位选数据,锁存器选用74HC573,因单片机P0口驱动电流较小,所以还要利用上拉电阻来提高其驱动能力,显示电路如下图所示:
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章



