
资料下载


使用STC89C51单片机和L298N芯片进行42步进电机控制的详细资料说明
mintsy
分享资料个
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。步进电机必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。
技术指标:
(1)、相数-----------电机内部的线圈组数。电机相数不同,一般二相电机的步距角为0.9°/1.8°。
(2)、步距角--------表示控制系统每发一个步进脉冲信号,电机所转动的角度。二相四线步进电机步距角为 0.9°/1.8°(表示 半步工作时为0.9°、整步工作时为1.8°),这个步距角称为“电机固有步距角”。
(3)、拍数-----------完成一个 磁场周期性变化所需要脉冲数或导电状态。
工作原理:
两相四线步进电机以8拍方式工作,则每个脉冲旋转0.9°,即每旋转一圈需要400个脉冲信号来励磁。步进电机的正、反转由励磁脉冲产生的顺序来控制,它的控制等效电路如图所示:
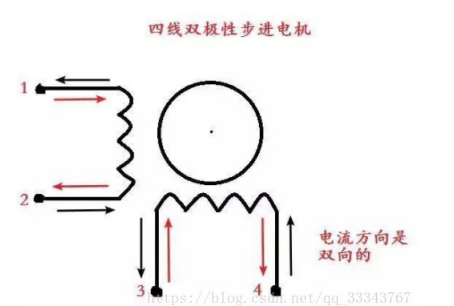
它有4条励磁信号引线1,2,3,4分别代表A,-A, B, -B。通过控制这4条引线上励磁脉冲产生的时刻,即可控制步进电机的转动。每出现一个脉冲信号,步进电机只走一步。因此,只要依序不断送出脉冲信号,步进电机就能实现连续转动。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
-
 机械编程
2021-03-02
0 回复 举报厉害了 收起回复
机械编程
2021-03-02
0 回复 举报厉害了 收起回复
- 相关下载
- 相关文章





