



中图仪器GTS机器人运动轴激光跟踪校准检测仪是高精度、便携式的空间大尺寸坐标测量机,是同时具高精度(μm级)、大工作空间(百米级)的高性能光电测量仪器。

GTS机器人运动轴激光跟踪校准检测仪能够解决大型、超大型工件和大型科学装置、工业母机等全域高精度空间坐标和空间姿态的测量问题。集激光干涉测距技术、光电检测技术、精密机械技术、计算机及控制技术、现代数值计算理论于一体,在大尺度空间测量工业科学仪器中具有高的精度和重要性。
功能特点
1、主机测量系统
(1)集成化控制主机设计
强大CPU处理能力、紧凑型的控制主机内置于激光跟踪头,主机集成化的设计大大减少设备连接线缆和携带箱体数量,方便现场快速安装。
(2)目标球自动锁定技术
目标锁定相机在断光时会在小范围内自动搜索到目标球,完成断光续接,自动锁定目标球,全过程不需人为操作,提高测量效率。
(3)HiADM测距技术
激光绝对测距(ADM)和激光干涉测距(IFM)融合技术(HiADM),将激光干涉测长的高动态速度与激光绝对测距功能相结合,保证测量精度,并实现挡光恢复。
(4)一体化气象站
一体化的环境气象站自动监视及更新环境气象参数,实时补偿温度、空气压力和湿度对激光在空气中空气折射率的影响,保证测量的准确性。
(5)MultiComm通信
设备与电脑之间可以通过硬件触发、有线网络或无线WIFI等多种方式数据通信,方便保密车间的现场使用,最高测量数据输出速度1000点/秒。
(6)便携性运输
集成化主机设计的激光跟踪头,集成式的配件运输箱,使得整个运输箱体系统体积小、重量轻,并且便于在不同的工作地点之间进行运输。
(7)密封防护设计
IP54防护等级,保证主机免受灰尘和其他污染物的进入,环境适用性强。
(8)稳固三脚架
GTS机器人运动轴激光跟踪校准检测仪稳定、便捷的三角架和底盘设计确保稳定的地面测量条件,灵巧升降机构设计省力操作,稳固的三角支撑系统避免环境震动带来的精度损失。

2、iProbe 6D姿态探头

iProbe 6D姿态探头采用机器视觉和重力对齐的传感融合技术,通过探头的局部坐标系和系统整体坐标系的配准变换解算测球的空间位置;不仅能对点、线、面、曲面等几何特征进行精确测量,而且能够根据探头的精确空间姿态对被测工件的内部特征、隐藏特征进行快速、高精度的测量。
3、iTracker 6D姿态智能传感器

iTracker 6D姿态智能传感器采用主动反向跟踪和重力对齐技术,在测量时实时地调整探头的姿态并始终正对锁定测量激光束,通过运动学模型精密解算目标的三维空间位置坐标和空间姿态角度,可以测量非常宽范围的俯仰角和偏航角。
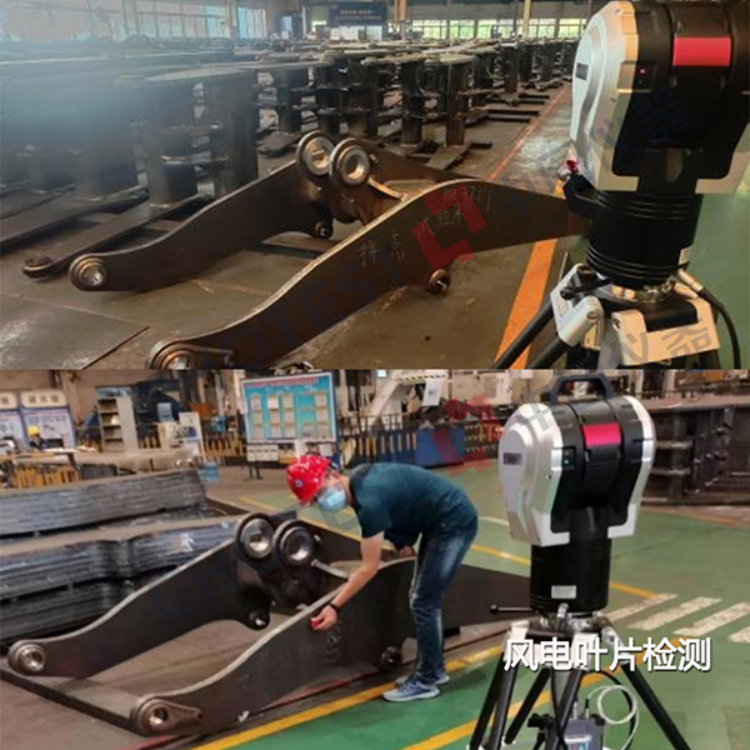
4、EyeScan跟踪式激光扫描系统
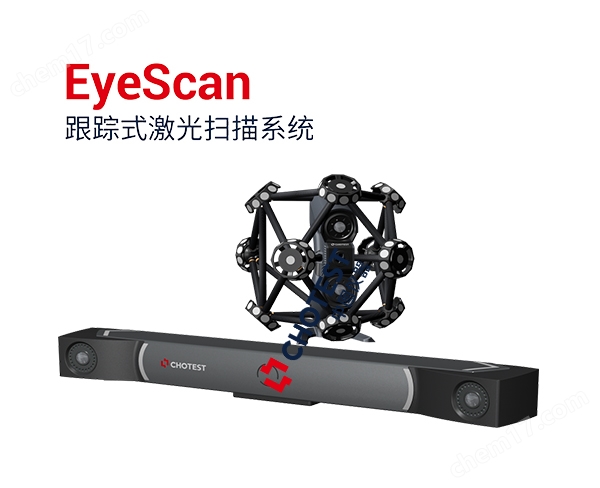
EyeScan跟踪式激光扫描系统,采用视觉动态跟踪技术,实时跟踪定位扫描头的空间位置,配合跟踪仪,可实现大中型物体的实时高精度扫描。操作简单,无需贴点。
5、SpatialMaster空间测量软件
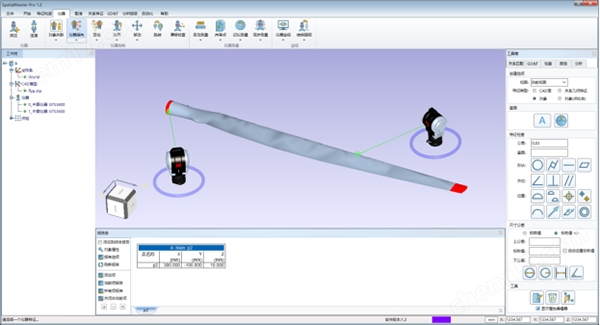
SpatialMaster(简称SMT)是一款自主研发,专为大尺寸测量设备如激光跟踪仪配套使用,并且通过PTB认证的通用三维测量分析软件。SMT支持多个任意类型的仪器同时测量,测量数据可溯源的,具有强大的数据处理分析功能,支持生产制造过程中的几何尺寸公差(GD&T)评定,此外SMT具有优秀的用户交互性,方便灵活的分析报告功能。
6、RobotMaster机器人检测校准套件
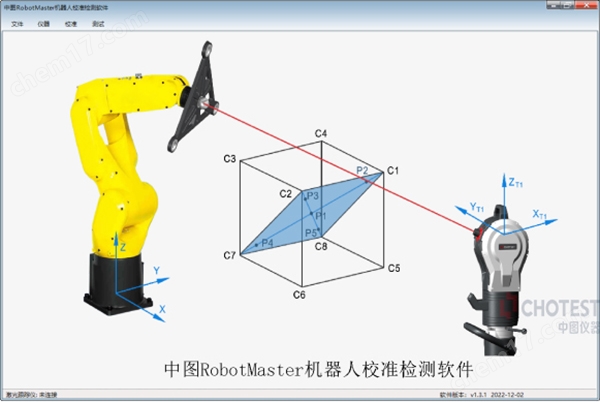
基于GTS激光跟踪仪的RobotMaster机器人套件为工业机器人空间绝对位置精度测量标定和性能检测提供高效可行的解决方案,既提供基于光学靶球的经济方案,也提供基于6D姿态智能传感器的增强方案。
产品应用
可广泛应用在各种大尺度空间精密测量领域,如
在航空航天领域对飞机零部件及装配精度的测量;
在机床行业中对机床平面度、直线度、圆柱度等的测量;
在汽车制造中对车型的在线测量;
在制造中对运动机器人位置的精确标定。
此外,激光跟踪仪还可以广泛应用到造船、轨道交通、核电等先进制造各个领域。
工业机器人精度测量
GTS激光跟踪仪+RobotMaster软件为工业机器人空间绝对位置精度测量标定和性能检测提供高效可行的解决方案。
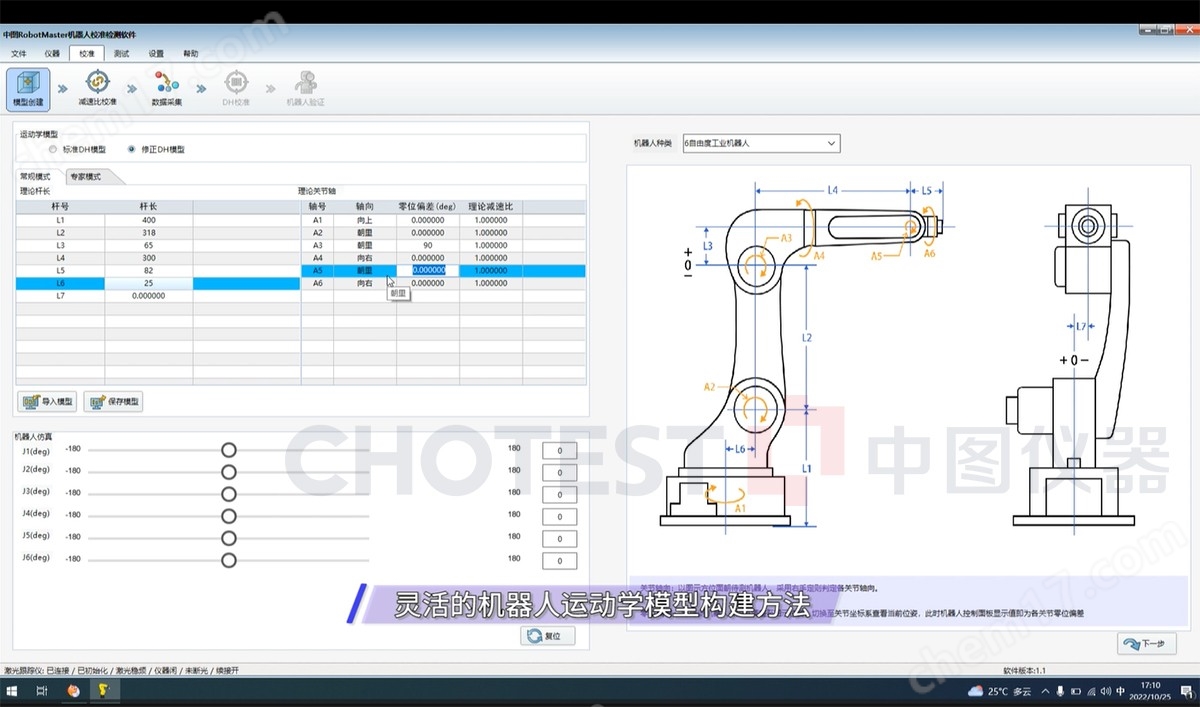
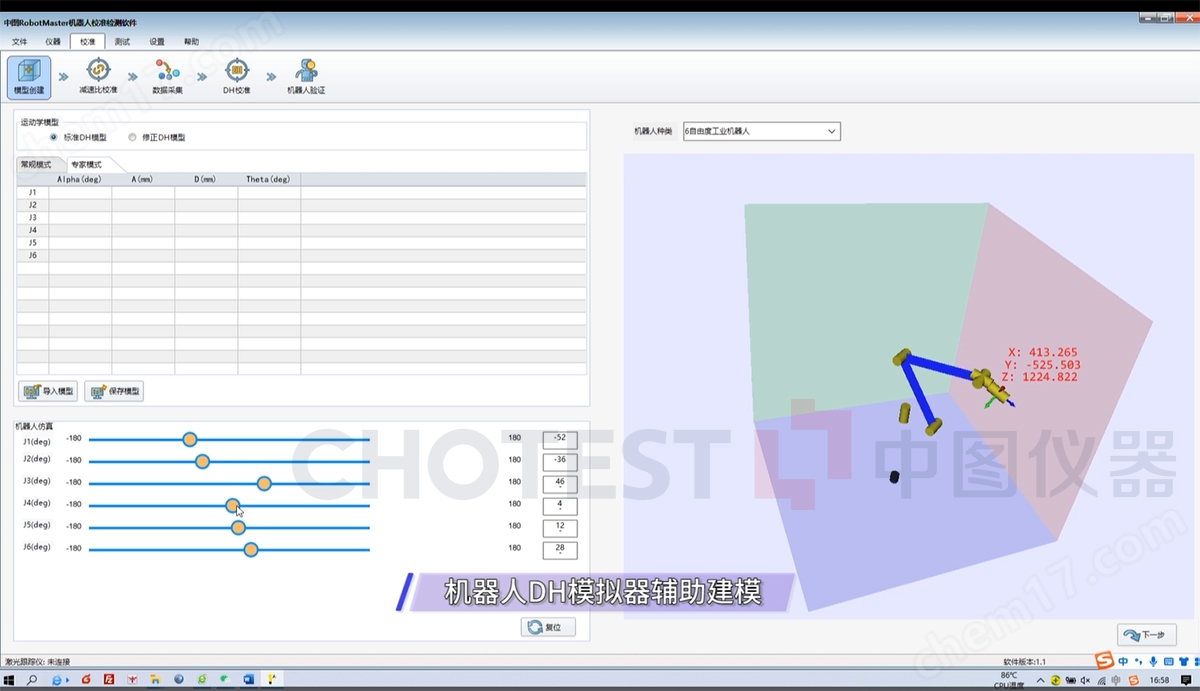
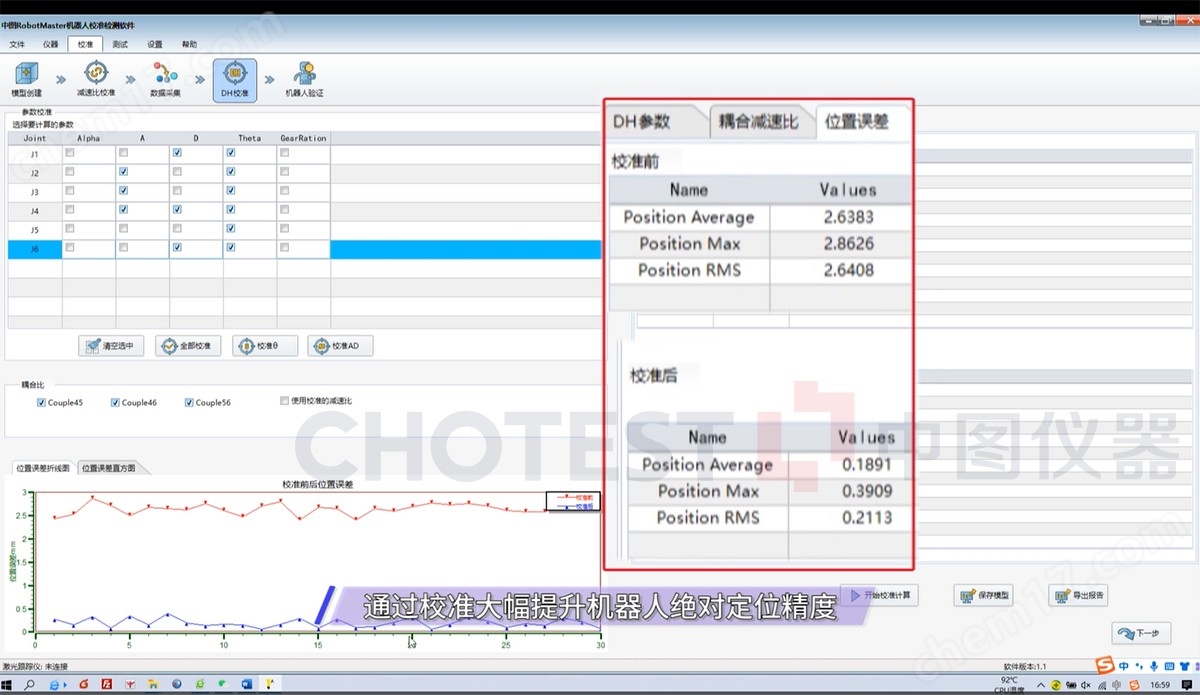
标定时,通过机器人的连杆理论长度、各关节旋转方向、机器人零点状态、各关节理论减速比这四项参数建立机器人理论运动学模型,让机器人运行30-50个关节角坐标点位,激光跟踪仪记录机器人法兰盘末端坐标。RobotMaster软件通过不断迭代计算,修正机器人运动学模型直至达到优状态,将优运动学模型修正至机器人系统,机器人空间绝对位置精度即可得到一定的提升,标定后空间绝对位置精度相对标定前可提升3~15倍左右。

RobotMaster软件还可以按照《ISO 9283工业机器人性能规范及其实验方法》对机器人在位置、姿态、轨迹等方面进行性能检测,检测内容包括14大项:
1.机器人位姿准确度和位姿重复性
2.多方向位姿准确度变动
3.距离准确度和距离重复性
4.位置稳定时间
5.位置超调量
6.位姿特性偏移
7.互换性
8.轨迹准确度和轨迹重复性
9.重复定向轨迹准确度
10.拐角偏差
11.轨迹速度特性
12.最小定位时间
13.静态柔顺性
14.摆动偏差