
陀螺仪LSM6DSOW开发(7)----融合磁力计进行姿态解算

陀螺仪LSM6DSV16X与AI集成(2)----姿态解算
驱动LSM6DS3TR-C实现高效运动检测与数据采集(5)----姿态解算
FPGA实现Cordic算法求解arctanθ
基于RT-Thread的RoboMaster电控框架(四)
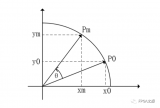
利用Cordic算法来进行姿态解算
mpu6050姿态解算原理_mpu6050姿态解算程序

 下载APP
下载APP
 搜索内容
搜索内容
