搜索内容
登录
MPU6050
39人关注
MPU-6000(6050)为全球首例整合性6轴运动处理组件,相较于多组件方案,免除了组合陀螺仪与加速器时间轴之差的问题,减少了大量的封装空间。
...展开
76
文章
50
视频
433
帖子
78053
阅读
关注标签,获取最新内容
全部
技术
资讯
资料
帖子
视频
CW32L012对MPU6050的数据进行卡尔曼滤波
原创
2026-01-05
1280阅读
CW32L012解算MPU6050姿态数据
原创
2026-01-05
2176阅读
CW32L012读取MPU6050姿态数据
原创
2026-01-05
1404阅读
小安派BW21-CBV-Kit入门教程之DMP6读取MPU6050数据
2025-06-19
1328阅读
mpu6050航向角漂移很严重的原因及解决方法
2025-03-01
5884阅读
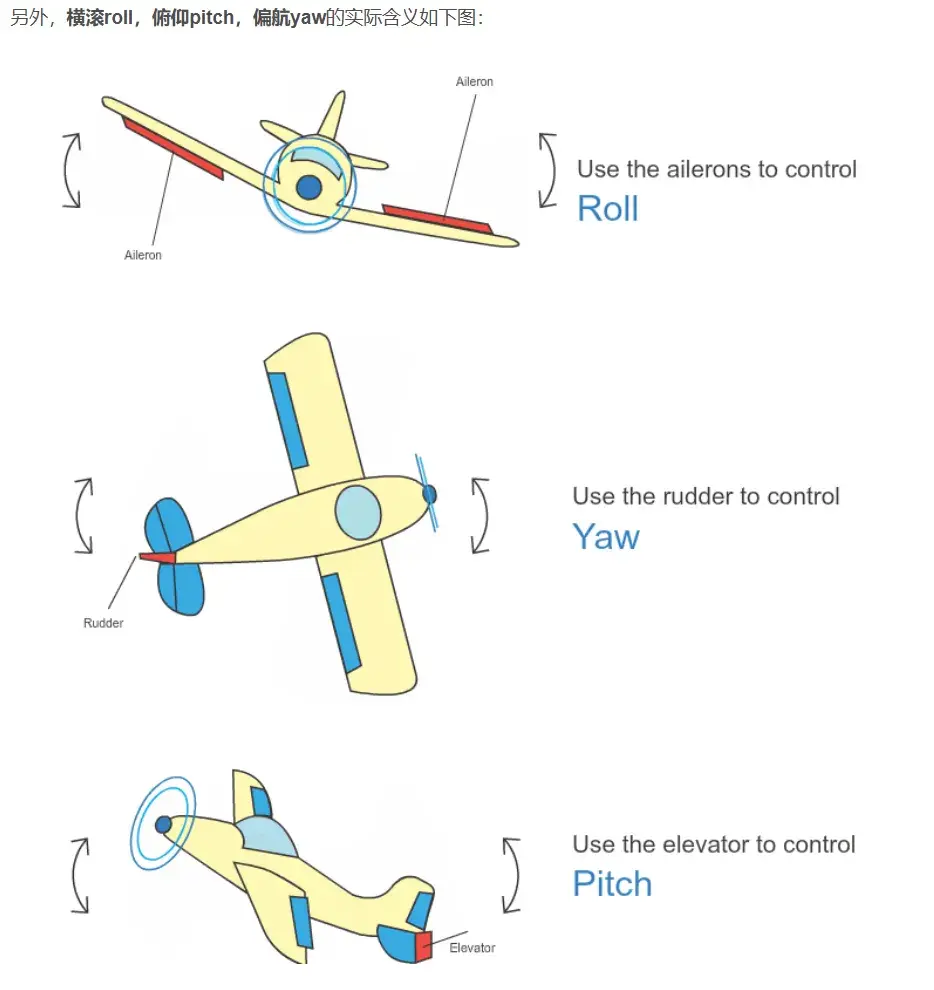
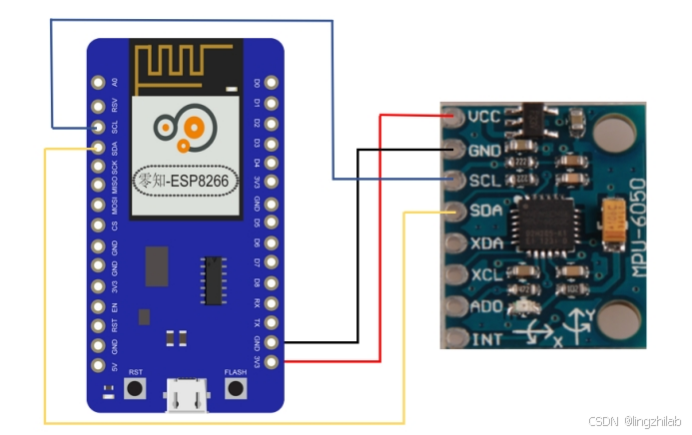
零知开源——ESP8266+MPU6050 实现运动姿态检测
2025-02-20
3717阅读
第17章-用6050走直线和转90度功能 平衡车入门---MPU6050陀螺仪的使用 超详细陀螺仪MPU6050模块输出姿态角
原创
2024-08-21
3565阅读
第八章V1.5-MPU6050陀螺仪使用方法 MPU6050姿态解算dmp MPU6050姿态解算STM32
原创
2024-08-15
2681阅读
硬件i2c读写MPU6050
2024-07-15
833阅读
ADXL345和MPU6050的区别
2024-01-04
1.4w阅读
mpu6050和mpu6500哪个性能好
2023-12-21
1.7w阅读
灵动微MPU6050应用源代码
2023-10-20
807阅读
MCU\mpu6050 通信及电路原理图
2023-10-17
1477阅读
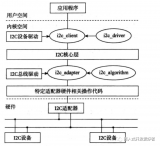
Linux内核中描述I2C的四个核心结构体
2023-09-04
4086阅读
小熊派Hi3861读取mpu6050数据并在oled显示
2023-08-14
1196阅读
小熊派Hi3861获取mpu6050数据在oled屏幕中显示
2023-08-14
4386阅读
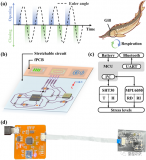
开发一种高集成度、低成本的活鱼可穿戴电子系统
2023-08-12
3034阅读
MPU6050使用互补滤波与卡尔曼滤波算法进行姿态解算
2023-08-07
1601阅读
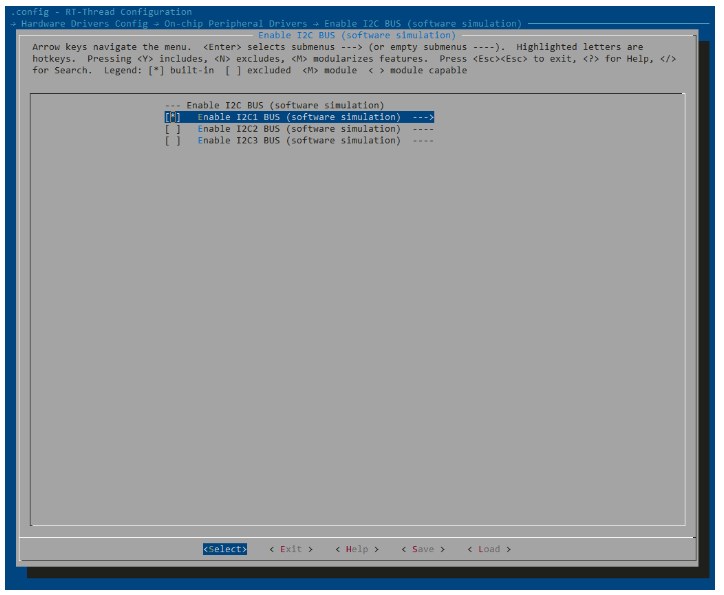
请问ARTPI是怎样使用软件I2C读取mpu6050的?
2023-08-02
3000阅读
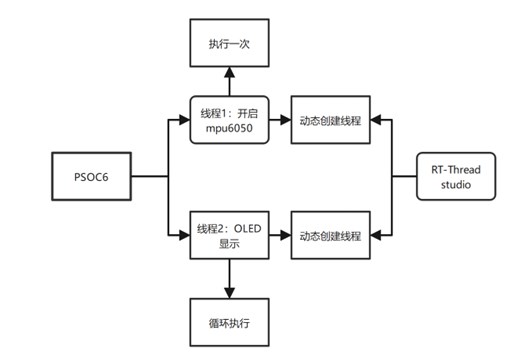
基于RT-thread和Psoc6实现的多线程mpu6050读取及显示
2023-07-31
2347阅读
上一页
1
/
16
下一页
相关推荐
更多 >
IOT
海思
STM32F103C8T6
数字隔离
硬件工程师
MPU6050
wifi模块
UHD
Protues
74ls74
STC12C5A60S2
×
20
完善资料,
赚取积分








 下载APP
下载APP
 搜索内容
搜索内容
