计算机视觉中的立体视觉和深度感知Python示例实现
LiDAR和立体视觉摄像头如何处理弱光、黑暗环境?
机器人如何构建3D语义地图?
极限校正的实现原理方法有哪些
什么是机器视觉?光电传感器与视觉传感器的比较
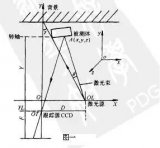
基于单目立体视觉的视觉测量步骤
ToF 3D视觉传感技术详解 双目立体视觉工作原理解析
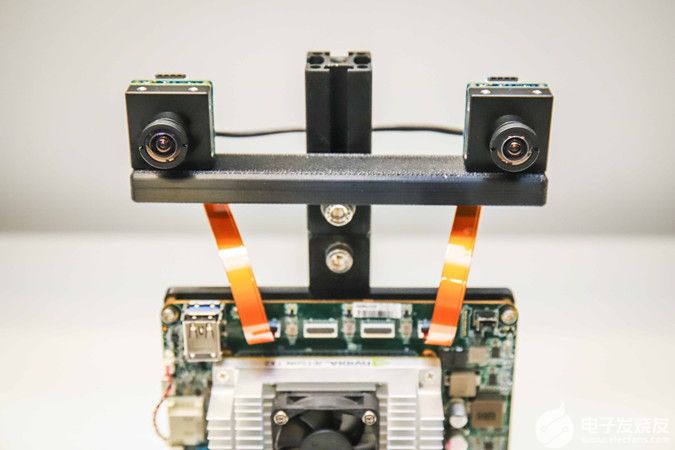
如何通过立体视觉构建小巧轻便的深度感知系统
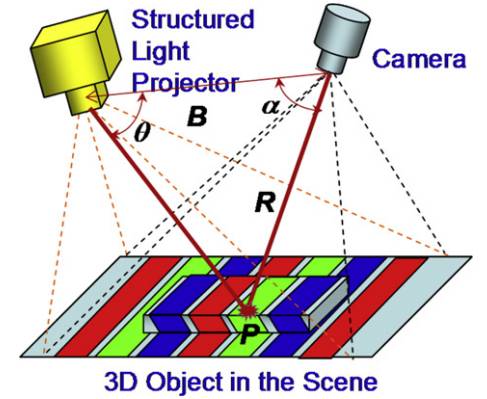
研究结构光3D成像技术分析
3D显示技术的总体分类
视差Disparity与深度图
FPGA的瓶颈被突破,双目的大规模应用即将到来!
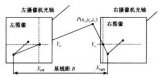
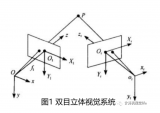
双目立体视觉三维测量原理

 下载APP
下载APP
 搜索内容
搜索内容
