
高压放大器在介电弹性体软体机器人中的应用

Aigtek安泰电子诚邀您莅临第十届软体机器人大会!

安泰高压放大器在介电高弹聚合物驱动器和软体机器人中的应用

清华大学:软体机器人柔性传感技术最新研究进展

高压放大器在软体机器人特性测试中的应用

清华大学:软体机器人柔性传感技术最新研究进展

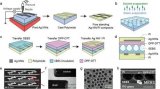
可用于机器人触觉感知的零泊松比柔性传感器

基于计算设计的超鲁棒性应变传感器,实现软体机器人的感知和自主性

用于机器人化血管栓塞的磁性柔性微纤维机器人研究

用于水质和病毒监测的电驱动软体机器人开发
北卡罗来纳州立大学研发新软体机器人:集滚动、旋转、移动功能于一体

哈尔滨工业大学研发液态金属磁性微型软体机器人

基于无线微型软体机器人的医疗应用

在基于聚合物薄膜的PENG上3D打印负泊松比
受Kirigami启发的基于可拉伸有机薄膜晶体管的压力传感器
软体机器人迈向绿色可生物降解人造肌肉问世
一种自矢量电磁软体机器人的新概念
可简单快速移动的软体机器人研究
形状记忆合金的研究现状与应用
波士顿机器狗上线 香港发布软体机器人

 下载APP
下载APP
 搜索内容
搜索内容
