
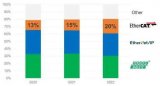
支持高速高精度控制和EtherCAT通信的RZ/T2L MPU
什么是端与端通信?
docker容器与容器之间通信

以太网通信基础知识
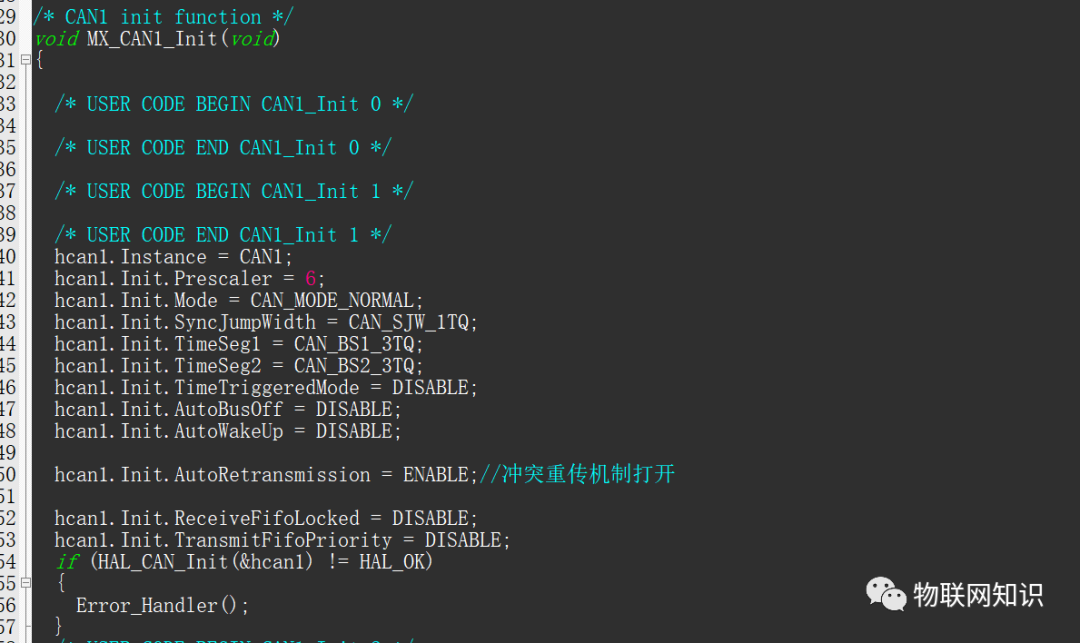
浅谈CAN总线的一般冲突机制

用MQTT实现云平台和边缘终端之间的双向通信

无线通信中物理层包含哪些内容

Unity与ROS链接介绍
多线程同步的几种方法
进程响应时间是指什么

DM-FMCW车载雷达通信一体化系统设计
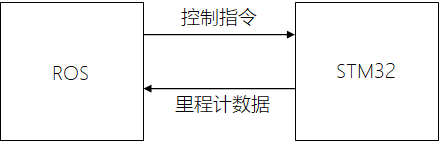
ROS与移动底盘的通信试验内容
springcloud如何实现分布式
浅谈CAN总线在铁路通信中的应用

Linux的SOCKET编程介绍
基于UDP协议的P2P打洞技术详解
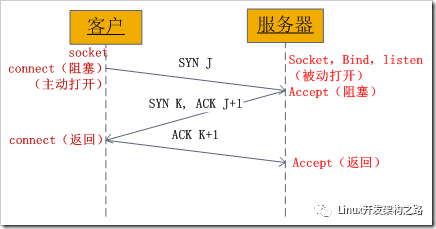
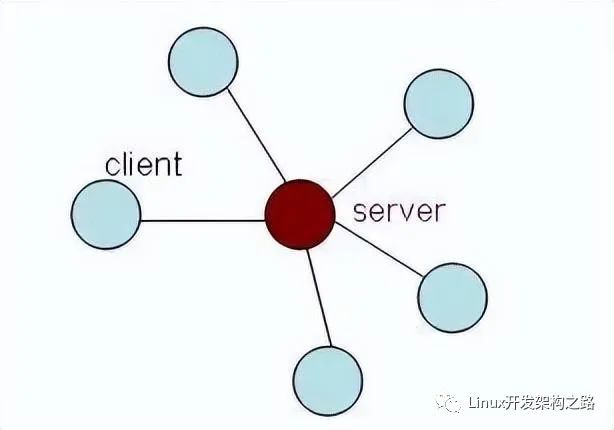
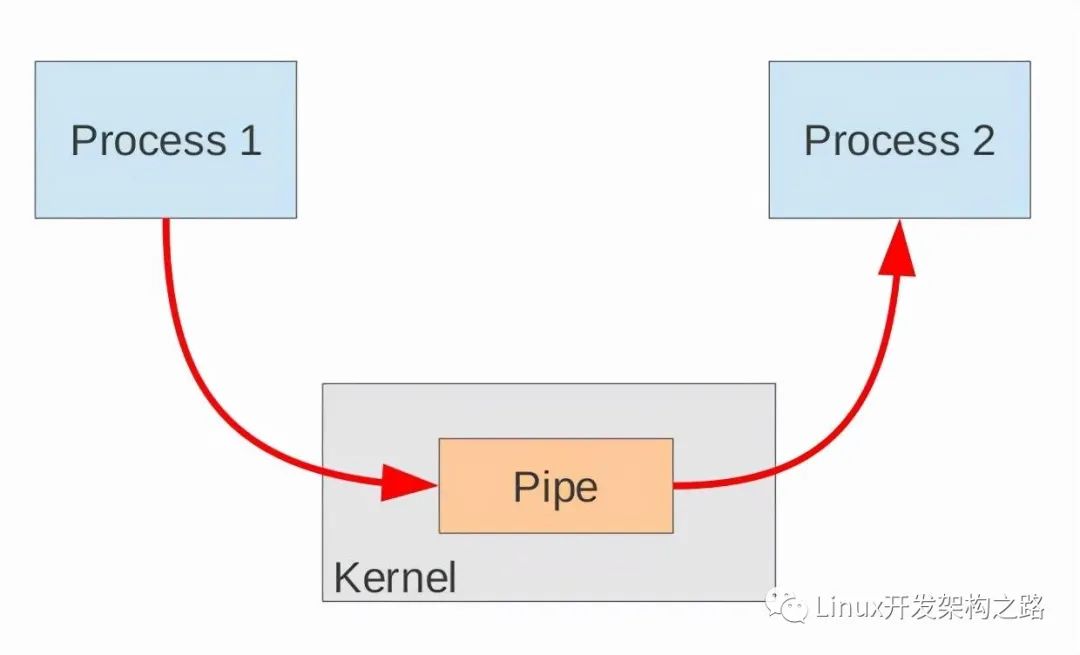
网络中进程之间如何通信

AUTOSAR架构下的多核通信介绍
进程通信的应用场景
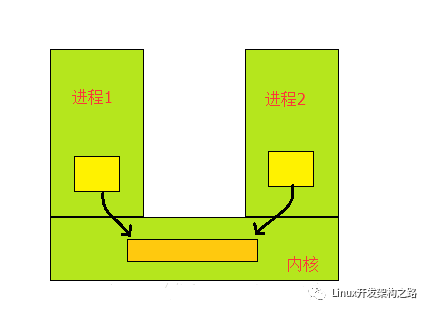
进程间通信的原理

 下载APP
下载APP
 搜索内容
搜索内容
