
RTOS中临界区的使用技巧
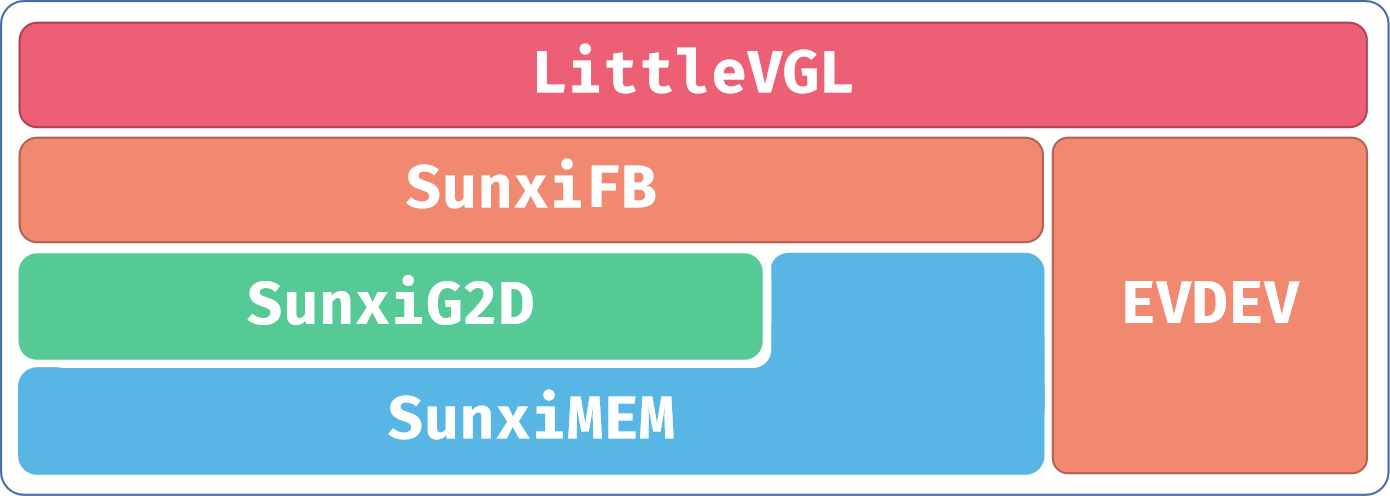
详解全志R128 GUI图形系统—LVGL篇

如何通过Tracealyzer实现Linux系统的跟踪?
如何设定RTOS中的任务栈(线程栈)大小呢?
RTOS内功修炼记(一)— 任务到底应该怎么写?
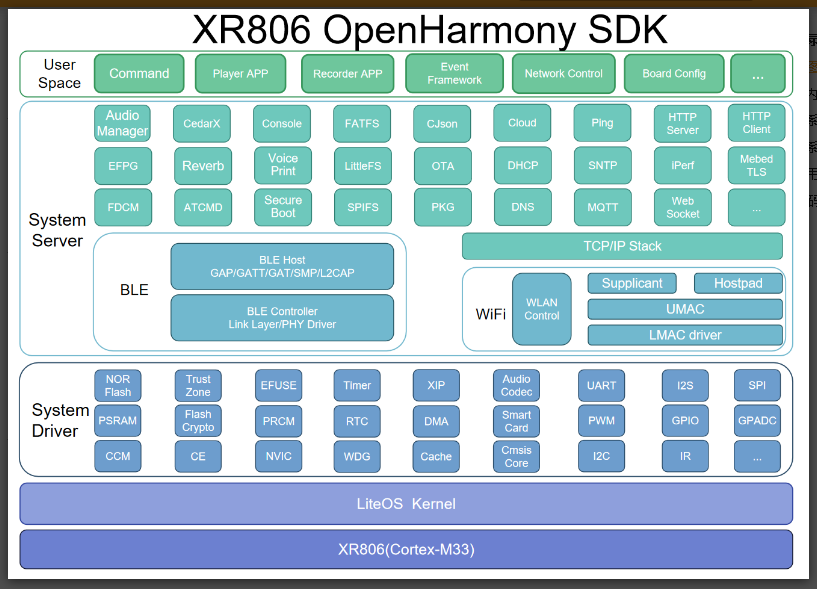
【XR806开发板试用】实战OpenHarmony固件编译
什么是实时操作系统(RTOS)
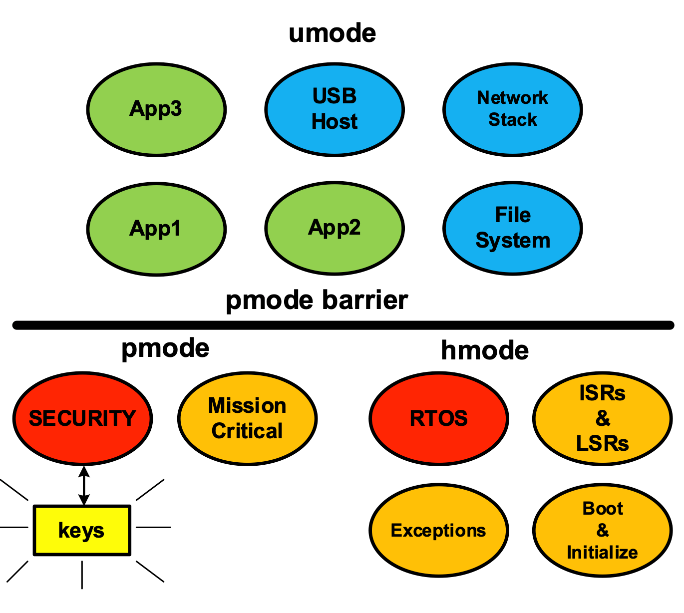
基于RTOS实现微控制器系统的高安全性分析

新手必看的RTOS基础知识
FreeRTOS的发展历史和技术演进
单片机为什么要使用RTOS?
智能汽车将促进嵌入式软件架构的接受度

RTOS中的线程、进程和协程详解
i.MX RT1170:VGLite移植RT-Thread Nano过程讲解(下)
i.MX RT1170:VGLite移植RT-Thread Nano过程讲解(上)

如何在Micropython+ESP32环境中使用定时器来实现各种实用功能
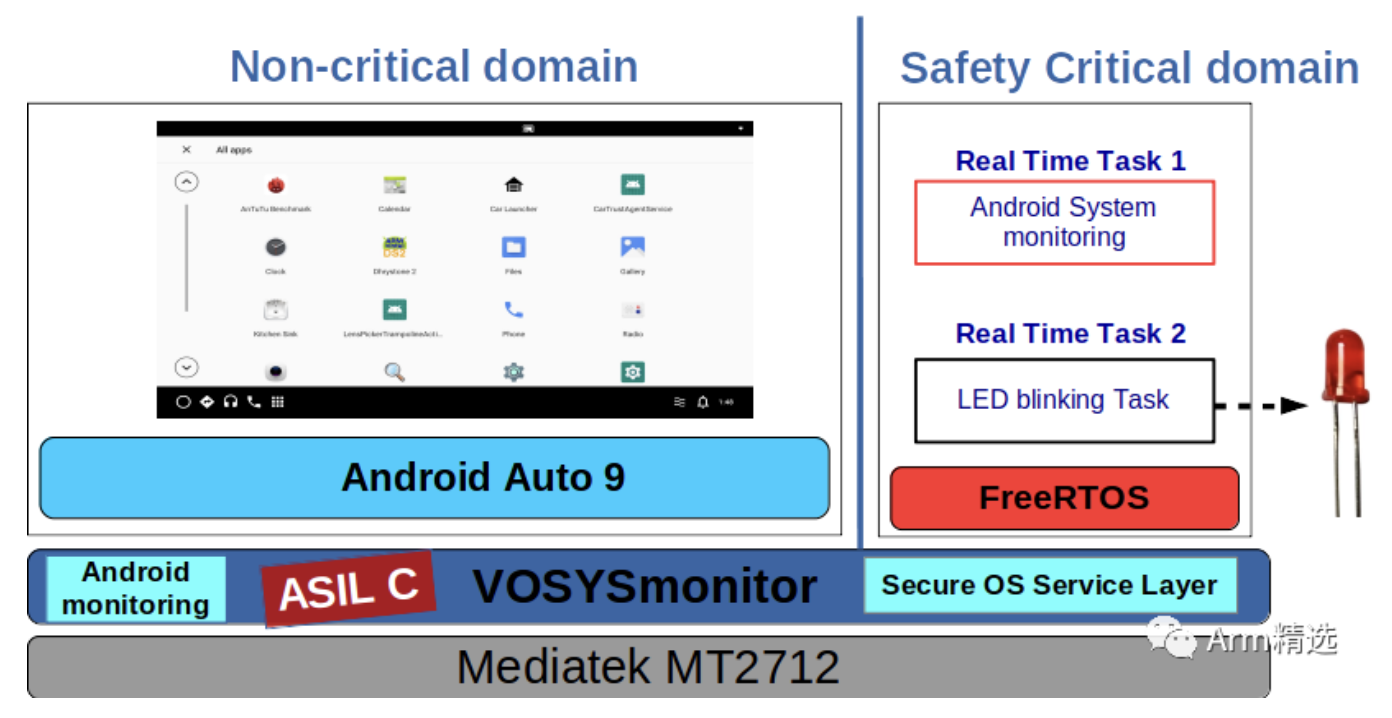
在MT2712实现基于VOsySmonitor的车载信息娱乐和实时操作系统
如何绑架C语言标准库函数?
基于RT-Thread的RoboMaster电控框架(六)
【全志R128外设模块配置】USB外设功能配置

 下载APP
下载APP
 搜索内容
搜索内容
