
资料下载


如何使用模糊控制进行智能车调速系统的设计
分享资料个
设计了一种基于模糊参数自整定的模糊控制智能小车调速系统,该智能车调速系统核心控制单元采用飞思卡尔半导体公司的HCS12 单片机。实验证明,该智能车调速系统能很好地满足小车在前进过程中对速度调节的快速响应和稳态误差小的要求,系统具有较好的动态性能和良好的鲁棒性。
智能车设计系统是一种以汽车电子为背景,涵盖控制、模式识别、传感技术、电子、电气、计算机、机械等多学科的科技创意性设计,它主要由路径识别,速度采集,角度控制及车速控制等功能模块组成。该实验过程要求小车在白色场地上,通过转向角和车速的控制,使其自动地沿着一条任意给定的黑色带状引导线行驶。
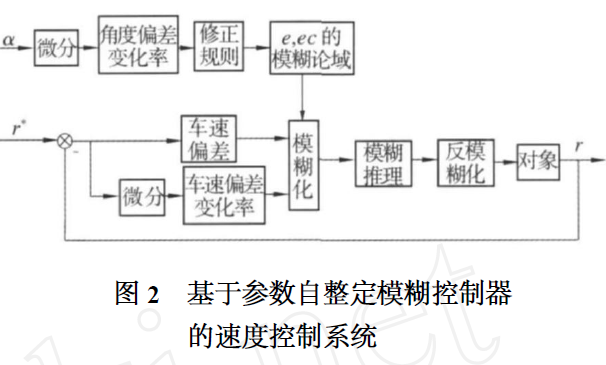
模糊控制器的参数整定是智能车控制系统中一个十分重要的环节。传统的车速控制方法有PID 控制、最优控制等。模糊控制的特点是控制响应快,对于不确定性因素的适应性强。采用Fuzzy2PI 控制策略进行直流电机的调速系统设计,克服了简单模糊控制和传统PI 控制的一些缺点。介绍了一种基于参数自整定的模糊控制单片机直流无刷电动机调速系统,采用参数自整定模糊控制器,使系统具有较高的控制精度和良好的鲁棒性。提出一种应用模糊推理功能实现PID 参数自整定的控制方法,可根据船舶动态特性的变化,自动重新整定PID 参数,从而改善了操纵性能和鲁棒性。提出了利用自适应模糊PID 控制器实现对永磁无刷直流电机调速系统进行设计的新方法,通过自适应因子将模糊控制器和PID 控制器结合,在线自调整控制参数,从而完善了PID 控制器的性能,提高了系统的控制精度。本研究着重分析智能车控制系统中最重要的速度控制问题,从传统的模糊控制思想出发,根据智能车前进过程中对速度调节的具体要求与行驶速度的实际情况,提出了模糊参数自整定的模糊控制方法,实验证明,该方法克服了传统模糊控制的局限性,更适合智能车的速度调节。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





