
资料下载


×
如何使用滑模观测器与分数阶锁相环实现无传感器PMSM矢量控制
消耗积分:0 |
格式:rar |
大小:3.22 MB |
2020-03-24
分享资料个
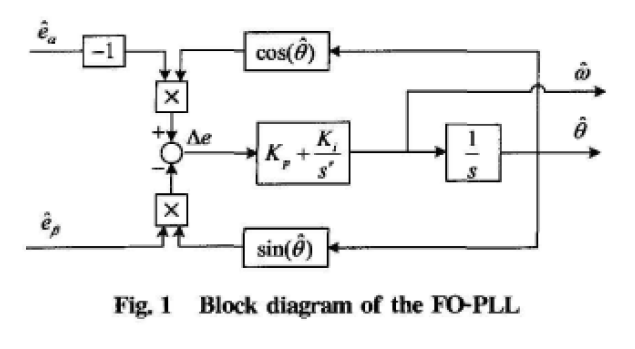
提出一种基于滑模观测器与分数阶锁相环(FO-PLL)的无传感器永磁同步电机(permanent magnet synchronous motor,PMSM)矢量控制算法。首先用滑模观测器估计出反电势,然后设计FO-PLL对转子位置和速度进行估计。切换函数采用饱和函数代替开关函数,有效地削弱了滑模观测器存在的抖振。所提出的FO-PLL包含一个可调的分数阶次r,因此与传统锁相环(PLL)相比,该FO-PLL具有一个额外的自由度,传统PLL也可以看成是FO-PLL的一个特例。通过选择合适的分数阶次r,能够获得更好的转子位置和速度观测性能。仿真结果证明了所提方法的有效性.

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




