
资料下载


如何制作智能两轮车安全系统
王越建
分享资料个
描述
使用的组件
超声波传感器在此设置中,超声波传感器用于检测进入的人。
加速度计在此设置中,加速度计是测量两轮车的速度。
蜂鸣器 5 5V 提醒用户
全球定位系统模块
系统范围
- 可以很容易地检测到障碍物。
- 可以避免车辆碰撞..
- 可以测量和提示车辆的速度。
- 相关人员也可以跟踪特定车辆的位置。
步骤1
此设置中使用的控制器是“Node MCU / ESP8266”。
首选原因:
*主要原因是,“它非常具有成本效益”。
*与所有其他微控制器相比,编程特性也非常简单。
*集成了对WIFI网络的支持。
第2步
连接超声波传感器
需要
在此设置中,超声波传感器用于检测障碍物,即道路上的坑洼和颠簸。它还可以在一定距离限制下感应车辆。当车辆以更近的距离接近此类障碍物时,从而通过喇叭/蜂鸣器声音提醒驾驶员。
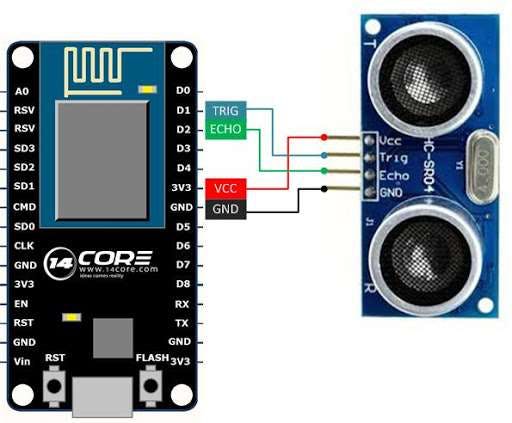
带有 NODE-MCU 的超声波传感器
第 3 步
将加速度计与设置连接
需要
在此设置中,加速度计用于测量两轮车的速度。一旦速度超过特定限制,它会自动提示注册服务超过速度。
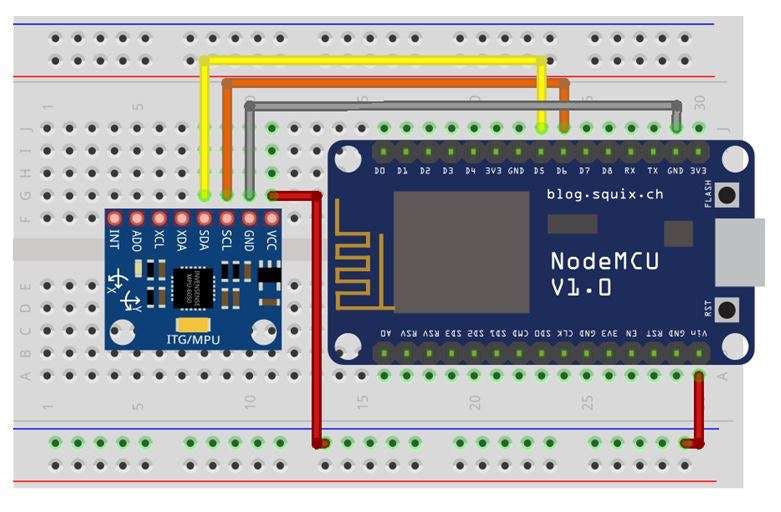
与 ESP 8266 的加速度计连接
第4步
蜂鸣器的连接
需要
在此设置中,蜂鸣器用作输出设备。它被用作指标
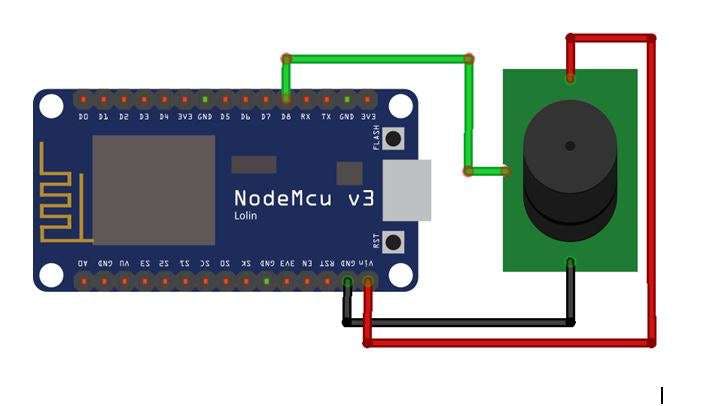
蜂鸣器连接
第 5 步
GPS MODULE 的连接
需要
在该模块中,GPS 用于跟踪车辆的位置并将位置分享给相关人员。
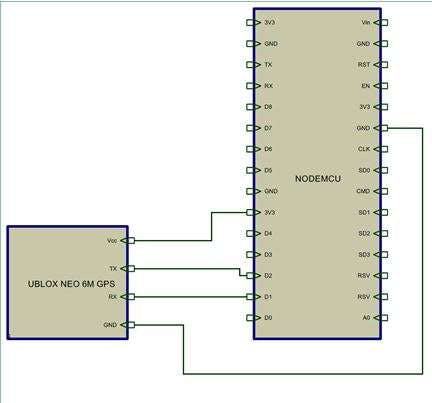
GPS 模块与 NODE MCU 的连接
云
用于实施拟议系统的云是 IFTTT
使用理由
- 广泛的支持——IFTTT 支持一些最流行的在线服务。
- 现成的小程序——您可能不必使用 IFTTT 来创建新的小程序。
- 免费使用。
- 简化自动化。
使用的工具/软件列表
1. Arduino IDE
Node MCU是基于广泛使用的ESP8266 -12E Wi-Fi模块的开源开发板和固件。它允许您使用简单而强大的 LUA 编程语言或 Arduino IDE 对 ESP8266 Wi-Fi 模块进行编程。
2. GPS模块
该软件可以在带有 GPS 接收器的笔记本电脑上使用。大多数商业软件在 Windows、Mac OS X 和 Linux 上运行。Waze 和谷歌地图等一些软件也可以在手机操作系统上使用。
项目成果
- 可以很容易地检测到障碍物。
- 可以避免车辆碰撞。
- 可以测量和提示车辆的速度。
- 相关人员也可以跟踪特定车辆的位置。
应用
该系统以其卓越的性能在市场上应有独特的地位,并将其作为默认的集成系统应用在未来的汽车制造中。
结论
该安全系统可以广泛降低两轮车事故发生的概率,帮助人类拥有最安全、健康的驾驶。
检测代码。
常量 int trigP = 2; //D4 或 GPIO-2 的 nodemcuconst int echoP = 0; //D3或GPIO-0的nodemcuconst int ledpin=5;//D1long duration;int distance;void setup() {pinMode(trigP, OUTPUT); // 将 trigPin 设置为 OutputpinMode(echoP, INPUT); // 将 echoPin 设置为 InputpinMode(ledpin, OUTPUT);Serial.begin(9600); // 以 9600 波特率打开串行通道}void loop() {digitalWrite(trigP, LOW); // 使 trigPin 为低延迟微秒(2);// 2 微秒延迟digitalWrite(trigP, HIGH); // tigPin highdelayMicroseconds(10); // trigPin 高电平持续 10 微秒digitalWrite(trigP, LOW); // trigPin lowduration = pulseIn(echoP, HIGH); //读取echo pin,时间单位为微秒距离=持续时间*0.034/2; //计算实际/真实距离Serial.print("Distance = "); //arduino 串行监视器Serial 上的输出距离。println(距离);延迟(3000); //暂停3秒,重新开始测量距离 if((distance<250)||(distance>270)){ digitalWrite(ledpin, HIGH); Serial.print("Obstacle\n");}else{ digitalWrite(ledpin, LOW);}}

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




